Invented by Asif RANA, Bernd Reimann, Alexandre HEILI, Silvan MEILE, Alexandar MAVROV, Markus Steiner, Hexagon Technology Center GmbH
Mobile vehicles are essentially self-driving robots that can navigate and perform tasks autonomously within a manufacturing facility. They are equipped with sensors, cameras, and advanced software algorithms that enable them to detect and avoid obstacles, follow predefined paths, and interact with their environment. These vehicles can be used for a wide range of tasks, including material handling, assembly, inspection, and transportation.
One of the main advantages of mobile vehicles in manufacturing is their ability to increase efficiency and productivity. These robots can work 24/7 without the need for breaks or rest, which allows for continuous operation and faster production cycles. They can also perform repetitive and mundane tasks with high precision and accuracy, reducing the risk of human error and improving overall quality.
Moreover, mobile vehicles can optimize the use of space within a manufacturing facility. They can navigate through narrow aisles and tight spaces, making them ideal for warehouses with limited space. By efficiently utilizing the available space, companies can increase storage capacity and streamline their operations.
Another significant benefit of mobile vehicles is their contribution to workplace safety. These robots are designed to operate in close proximity to human workers, and they are equipped with advanced safety features such as collision avoidance systems and emergency stop buttons. By taking over dangerous or physically demanding tasks, mobile vehicles can reduce the risk of accidents and injuries, creating a safer working environment for employees.
The market for mobile vehicles in manufacturing is expected to continue growing in the coming years. According to a report by MarketsandMarkets, the global market for AGVs is projected to reach $3.64 billion by 2022, growing at a compound annual growth rate (CAGR) of 9.8% from 2017 to 2022. This growth can be attributed to the increasing demand for automation and the need for cost-effective and efficient manufacturing solutions.
However, there are still some challenges that need to be addressed for wider adoption of mobile vehicles in manufacturing. One of the main challenges is the initial investment required for implementing these robots. The cost of purchasing and integrating mobile vehicles into existing manufacturing systems can be significant, especially for small and medium-sized enterprises. Additionally, there may be resistance from workers who fear job displacement or lack the necessary skills to operate and maintain these robots.
To overcome these challenges, manufacturers need to carefully assess the potential benefits and return on investment of implementing mobile vehicles. They should also provide training and support to employees to ensure a smooth transition and address any concerns or misconceptions. Governments and industry associations can also play a role in promoting the adoption of mobile vehicles by providing incentives, funding, and guidance.
In conclusion, the market for mobile vehicles in manufacturing is experiencing significant growth due to their ability to improve efficiency, productivity, and safety. These robots offer numerous benefits, including increased operational efficiency, optimized use of space, and enhanced workplace safety. While there are challenges to overcome, the potential advantages make mobile vehicles a promising solution for the manufacturing industry.
The Hexagon Technology Center GmbH invention works as follows
A system including at least one mobile device configured to move independently.” The mobile vehicle includes a spatial location system, an autonomous navigation unit and propulsion unit. It also has a local edge computing unit that allows edge analytics software agents to perform local data analyses at the mobile device. The system uses an automatic deployment workflow that includes at least one task. A mobile measurement unit with a spatial measuring sensor unit is configured for the temporary establishment of a local reference cell. The temporary instance is created temporally, and it is set up with an individual level for spatial accuracy as well as a local range that is limited to the individual. This individual level is defined dynamically by the accuracy requirements of the task.
Background for Mobile vehicles in manufacturing
For monitoring and quality controls of manufacturing and for deriving reports, statistics and notifications, both the interim results as well as the end product are measured in relation to their physical characteristics, of which one of the most significant is the geometry. And/or their functional behavior such e.g. Routine testing is described in the European Patent Application NR. 18154500, or other. Modern industrial solutions rely on fixed measurement protocols. These typically involve static platforms that perform measurements at predetermined, specific stations in the manufacturing chain. This can include, for example. “This can include taking samples and measuring them on dedicated coordinate measurement machines either in line with production or in dedicated Metrology rooms.
Some examples of known technologies can be found in US 2017/235603, US 2017/222999,US 2016/216974,US 2017,060574, WO2017/16570 and US 2017/023906 as well as WO2017/165708, WO2017/165708, EP 3 156 898 etc. US 2017/235603, US2017/2216974, US2017/060574 WO2017/16570, US2017/023906 WO2017/165708, EP3 156 898 etc. are examples of known techniques.
However, the existing approaches are not flexible and scalable, and they can be difficult to use. They also require a lot of programming and adaptation by skilled artisans, especially in light of changes or modifications to products and/or processes. Mobile vehicles are used for a variety of tasks in manufacturing environments. However, they can only perform simple navigation and movement within their environment. These autonomous navigation methods are generally not accurate in terms of spatial information. The present invention can include autonomous navigation of mobile vehicles, but it goes beyond that by creating a smart factory with highly intelligent, self-learning and flexible workflows, in which process optimization by machine learning is carried out.
It is the object of certain aspects of this invention to improve an existing manufacturing environment using intelligent mobile vehicles. It is an objective to provide improved and more flexible manufacturing methods, systems, or devices. There can be a special objective to achieve autonomously the required spatial referencing accuracy for the different tasks. This should be done in a short amount of time, and with flexibility. All this is to be achieved in a smart-factory environment, also known as industry 4.0. According to the invention, a smart factory environment consists of Cyber-Physical Systems, Industrial Internet of Things devices, networked sensor, advanced robotics and edge-, cloud- and fog-services. It also includes the infrastructure and software agents that are required. There is a networking infrastructure that can be used for both downstream and upstream services in a horizontal or vertical direction. There, flexible, dynamically extensible and open communication protocols can play a key role in achieving machine-machine and machine-human collaborative work. An embedded manufacturing system, for example, can be vertically linked to a business process in factories and enterprises as well as horizontally connected with dispersed value network that can be managed real-time. This allows for an end-toend digital integration across the entire value-chain, as well as dynamic engineering and business processes which can be automated in a high degree using intelligent agents that are distributed across factories and enterprises. These intelligent agents not only provide assistance with optimized decision-making and respond flexibly to failures or disruptions, but also assist in a flexible manner. But can also include continuously refining algorithms of machine learning, which are interlinked, aware of one another, and can deploy new or better machine-learned strategies for similar problems in other agents. There is a multilevel system of cyber security that includes unique identifiers and integrated security architectures. It also has digital signatures, checksums and blockchain. This can ensure that the automated system as a whole is not compromised or hacked.
The present invention does not promote workerless factories, but rather a participatory work design where humans are present at the factory. The intelligent agent system allows for a human-machine cooperation with so-called cobots, such as a Franka Emika robot, a Baxter robot platform, or others, without separating robots and humans. As a means of efficient human-machine interactions, augmented reality systems (AR), virtual reality systems (VR) or mixed reality systems (MR) can be used. The invention consists of a flexible, configurable combination of fog computing and/or cloud computing for big data processing, along with intelligent edge computing for real-time demands. Smart manufacturing can be transformed from reactionary, statistical practices into predictive ones by using a distributed, big data or cloud-based analytics approach. Smart machines equipped with edge intelligence can work autonomously and communicate directly with partners. They can solve problems, make decisions and in many cases, do so without human intervention. Artificial intelligence systems can automatically extract additional capabilities at the plant from other entities or previous experiences.
The present invention does not only apply to real-world factories, but also to collaborative virtual (VF) platforms. This means that processes are in a planning and design phase of production. The present invention can be used to simulate and test virtual scenarios for the entire product life cycle, e.g. Machine learning techniques can be used to train on data from simulations, numerically rendered pictures, 3D models and other sources. “This will result in artificial intelligence systems that are well-trained right at the beginning of production without the need to gather real-world training data. Instead, the artificial intelligence system can be refined with real-world data as it is being produced, on the fly.
The independent patent claims describe the features that further develop the invention in an alternative or advantageous manner. The dependent claims describe features that further develop the invention by an alternative or beneficial manner.
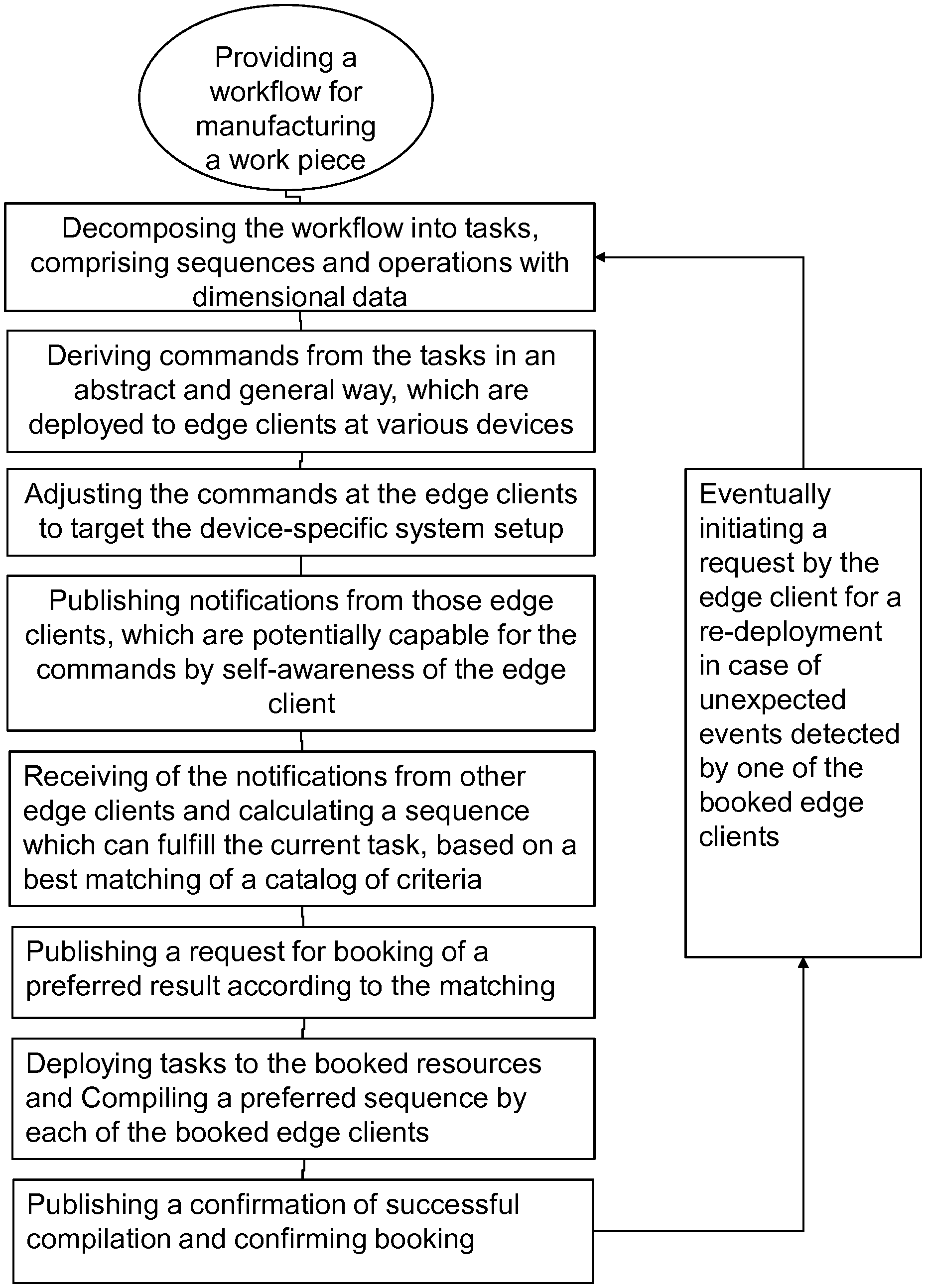
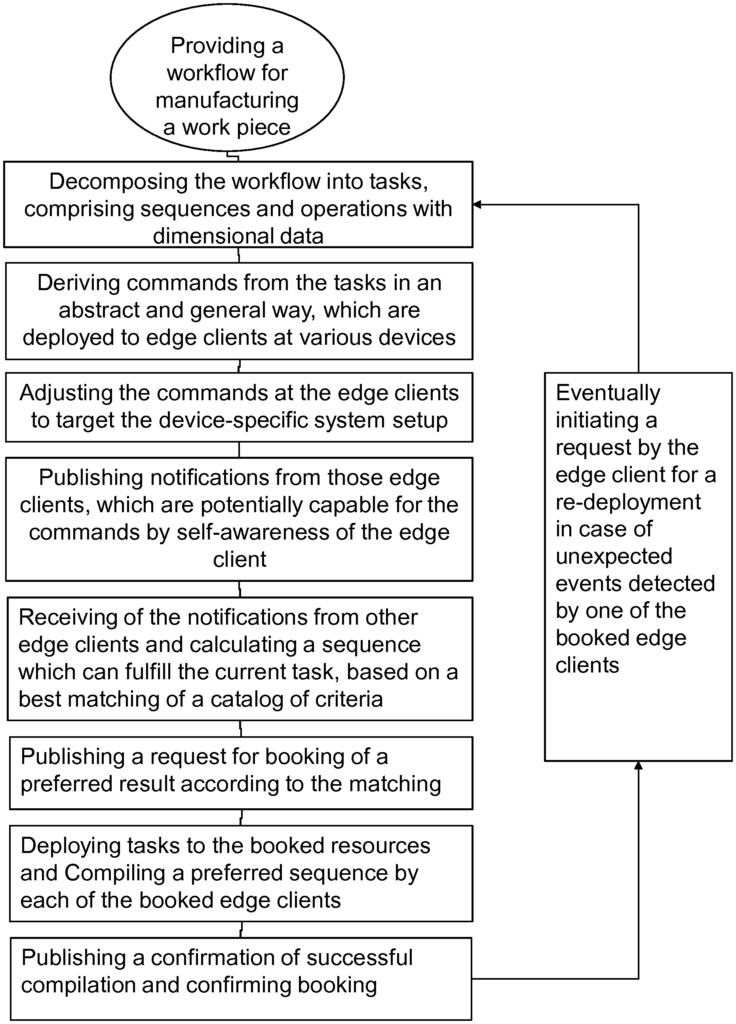
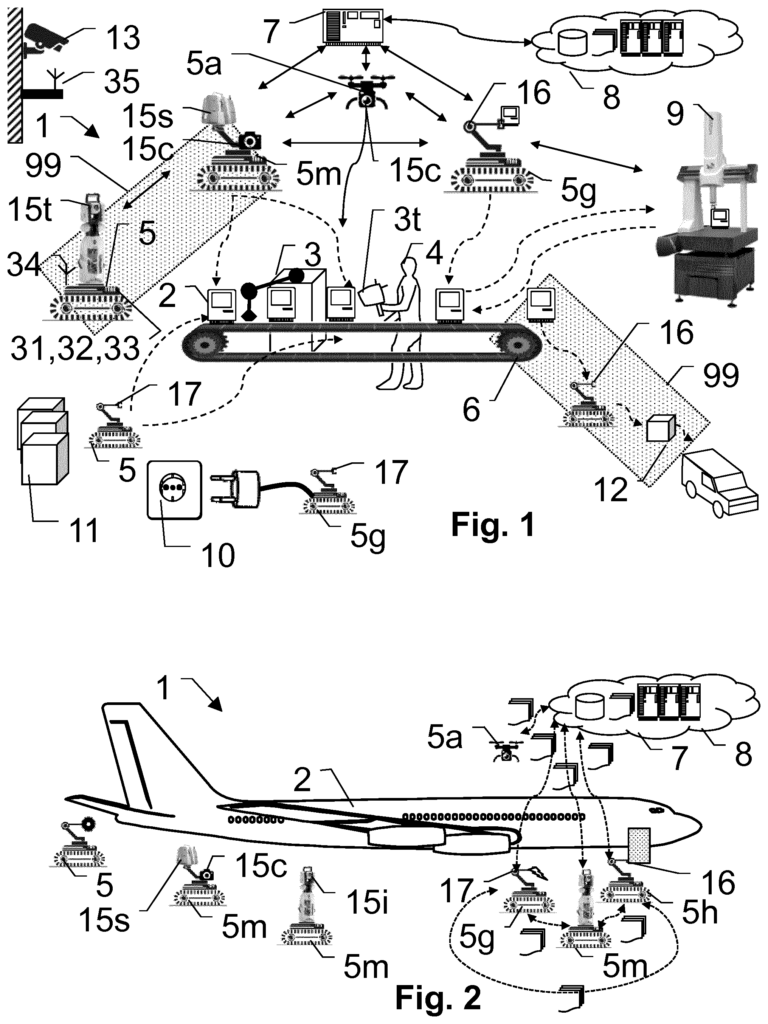
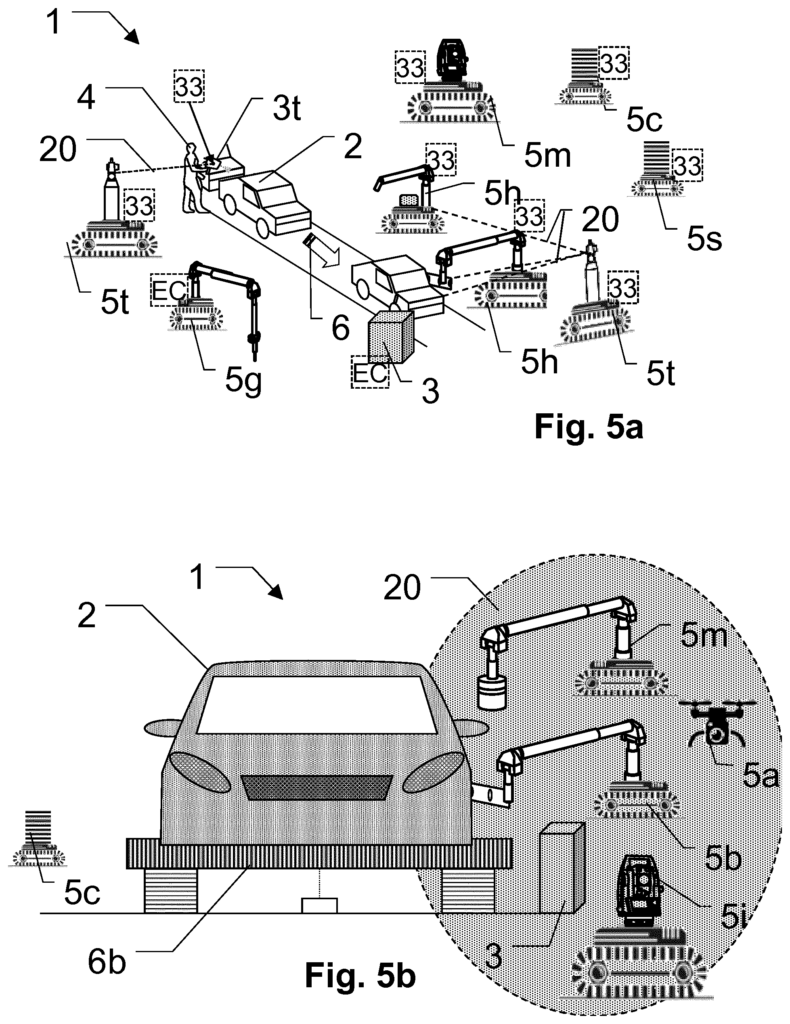
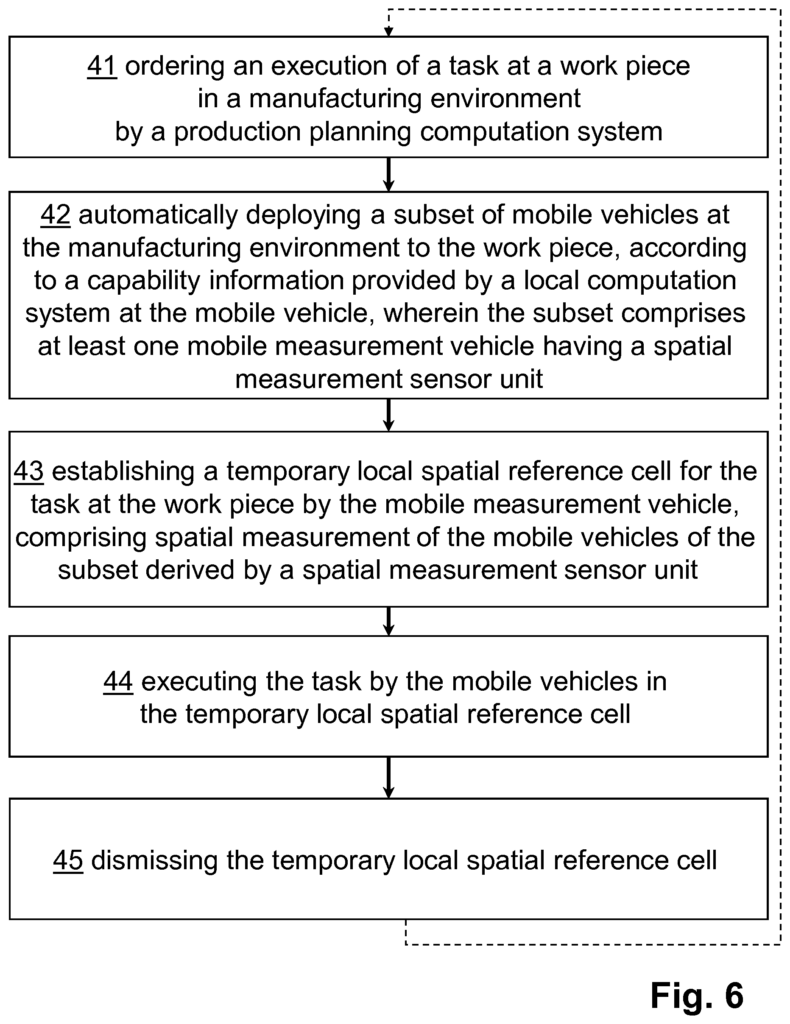
The invention is a system that includes at least one mobile device, which can move autonomously within a smart factory where a workpiece is processed. The mobile vehicle includes a spatial location system that determines the location of the vehicle within the manufacturing environment. It also has an autonomous navigation unit and propulsion unit to provide mobility for the vehicle. A communication interface is also provided on the mobile vehicle, which provides a data connection to at least another mobile vehicle or to a fog and/or cloud computation and storage system. This can be configured to perform cloud analytics and include an analysis using big data processing. The fog-and/or cloud computation and storage systems can be implemented as a stationary computation and storage device external to the mobile vehicle. For example, the system can be located either on-site or away from the manufacturing environment. It can include at least a computation unit and data storage and a link with a network of the manufacturing environment. Data links can be established in the manufacturing environment network, e.g. Directly between mobile vehicles to allow direct interaction with the vehicles or swarm intelligence. Indirectly via a hub, gateway or control system. It is preferred that a mixture (at least partly dynamically selected) of these data links be used. A mobile vehicle edge computation unit is configured to perform local data analysis by edge analytics software agents that are intelligent and deployable. The edge computing unit of the mobile device can comprise a central processor unit, a storage and program code configured to perform a local analysis of data at the vehicle. This includes data generated by the vehicle as well as data from task information or the manufacturing environment. The manufacturing environment network is accessed through the communication interface between the edge computation unit and the manufacturing environment. This local data analytics can be preferably established by intelligent edge analytics software agents. These software agents comprise at least one module of program code that is transferred from the manufacturing network to the edge client and executed by them. These edge analytics software agents could be e.g. Also, the communication interface can be used to deploy the edge analytics software agents from at least one mobile vehicle or the fog-and/or cloud computation and storage system. Edge computation unit may be operated in real-time and/or with a stream analytics agent. It can also be configured to communicate via the communication interface with at least one mobile vehicle, the fog-and/or cloud computing and storage system. The invention can include an automatic deployment for processing the work piece for at least one mobile vehicles, wherein the workflow includes at least one task. The workflow information is preferably transferred through the manufacturing network and can take the form of a data set containing a series tasks that include modification steps for the work piece. This current task can include a spatial relationship or dependency between the work piece, and at least one tool or component provided by one or more mobile vehicles or by the manufacturing environment. The spatial dependency is extracted by analyzing some relative spatial information which is included in the current task.
At lease one mobile vehicle can be configured as a measurement vehicle mobile, comprising at most one spatial measurement unit. According to the invention, this mobile measurement vehicle can be configured to create a temporary instance a local reference cell using data from at least one sensor unit. This temporary instance can be configured in particular to establish a reference frame that allows mobile vehicles participating in the task to be dimensionally referenced to one another and/or to parts of the manufacturing environment. This temporary instance of a spatial reference cell can be configured to establish a spatial reference frame for mobile vehicles involved in the current task. The temporary instance of the cell should only include mobile vehicles, objects, and/or work pieces that are required to complete the current task. The temporary instance is created according to the individual requirements for the current task. Individual spatial or dimensional needs can be derived or explicitly included in the current task. The temporary instance of a spatial reference cell, for example, can be automatically created based on the capabilities of the mobile measuring vehicle. These capabilities can be derived from a mobile measurement vehicle’s self-awareness or self-reflection. This self-awareness or self-reflection may comprise a list of parameters relating to the capabilities or functionalities on the mobile vehicle where the edge computing unit is located, and for which an edge analytics agent in the edge compute unit of the mobile device calculates a comparison against those requirements, particularly spatial, of the current task.
The invention may be described in another way as a system that comprises multiple mobile vehicles configured to move independently within a smart factory, where a workpiece is processed. The mobile vehicles include at least
Such a edge computing unit, which is also referred as edge client (EC), may consist of several agent modules that are connected together. Using a service-bus or a software for system and data integration such as EdgeFrontier(EF) from Intergraph Corporation. Examples of integration tools that can be used in conjunction with the application include, for example. You can find them in EP 3156 898, US2008/0005287 or US2008/0010631. No. 7,735,060. This invention provides an IIoT edge solution that is extensible, with process automation, secure connectivity at the edge, and dynamically changing workflows. These edge clients can be configured to act as networked computing nodes, comprising a storage containing program code (e.g. As embedded firmware, and/or communication interfaces (such as network interfaces) are used to access the program code or configuration data of an edge client that is stored at least in part at a remote device. Cloud or fog. The network interface can also be configured to send digital data, such as messages, commands or datagrams. It may also include images, video streams, JSON, BSON, YAML, OGDL, CSV, XML, etc. “In an exemplary embodiment of the invention, a system can extend edge intelligence platforms in order to provide data and services, either to a user, cloud computing unit, or management agent. This can be done by using several software agents, which can be installed on agent modules that are connected to devices, and then connected together via a service bus.
The invention also includes an automatic deployment of a work flow for processing the work piece across multiple mobile vehicles. This work flow contains at least one task. In this case, one or more tasks are deployed automatically in a collaborative work flow across multiple mobile vehicles.
The temporary instance is created for a limited time of the duration of a current task that must be established by the subset of mobile vehicles at the work piece. The temporary instance is created for a short time, based on the duration of an ongoing task to be performed by the mobile vehicles.
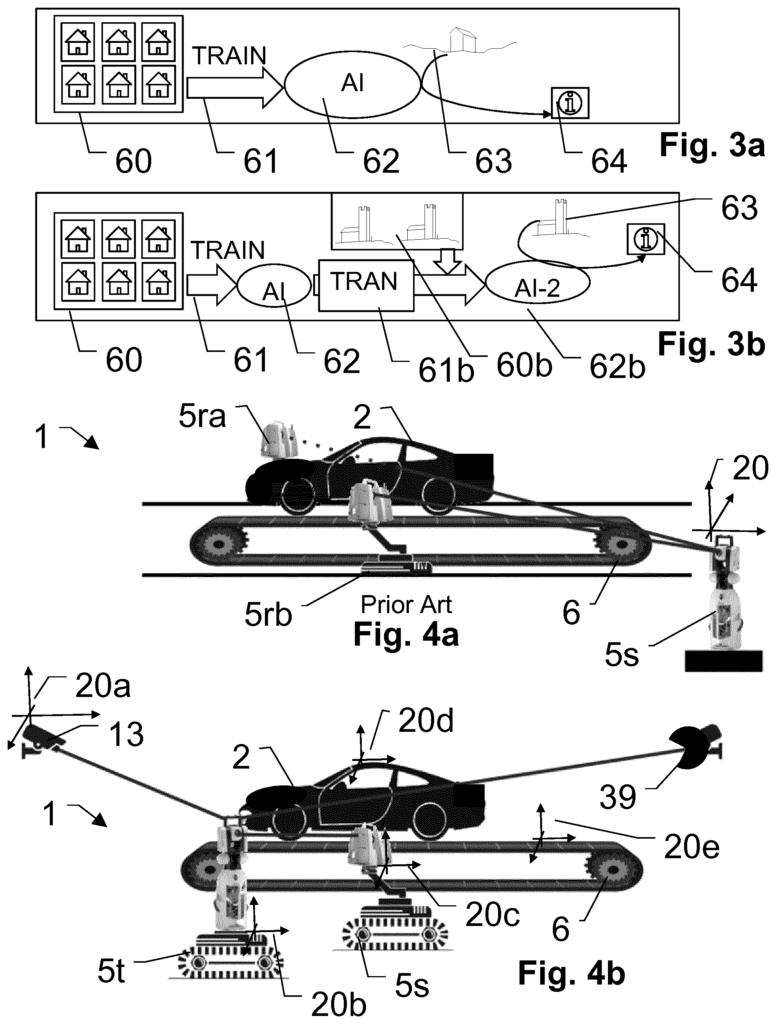
In the system, a transfer-learning mechanism can be established in between agent modules or edge clients at multiple mobile vehicles and/or the edge client of a mobile vehicle and a fog and/or cloud computing system. Transfer learning can be e.g. The learning is based on the data of a mobile vehicle. A stored knowledge is then deployed to the mobile vehicle. This can be used in a Deep Learning implementation by, for instance, transferring and adapting the knowledge as a machine-learned model or in a form of neural networks or a dedicated portion. Transfers can be made between or among
An information obtained at the mobile device can be locally processed by the edge computation unit, by a stream analysis agent. A limited portion of information that is important for the real-time operation at the vehicle can then be processed locally by the edge analytics agent.
Therein, stream analytics agent is configured filter the limited part of the information. In particular, wherein the filtering is dynamically configured to provide specific, preferably processed information to one or multiple edge client agents that are currently active at the edge computing unit and dependent on the task. Edge analytics agents process the edge client agents that are active in real-time or near real-time to derive action based on this limited portion. The stream analytics agent transfers a subset defined of information to the cloud, which in general is larger than the restricted portion. Cloud system computingly intensive cloud analytics agents then derive non-real time critical sophisticated decisions and optimizes the manufacturing environment based on this subset, cloud stored information history and business and management data. Support vector machines, random forest, neural networks, linear and nonlinear regression etc.
According to the present invention, dynamic quality control can be provided within a smart manufacturing environment. This smart connected factory can be implemented as a central location, plant, or geographically distributed locations where work pieces, items or products are processed. Processed can refer in this context to workflows and tasks that include at least one, e.g. Made, manufactured, produced or fabricated, set up, assembled, measured and tested, stored, packed, distributed, repaired. As an example, in this context a task such as e.g. An inspection task can no longer be determined in advance, but it can be performed in a dynamic and flexible manner, based on the actual demands in the manufacturing environment.
For instance, insights gained from advanced analytics algorithms in the manufacturing process could be used to perform adaptive measures, e.g. Like scanning, probing and image acquisition. And/or to perform appropriate actions, such as machining or sending a part to another workspace. Like machining or sending a piece to another workspace. When qualified. A measurement platform, for example, does not need to be fixed at a certain location or stage of manufacturing. Instead, it can be provided as a mobile vehicle that can provide its measurements capabilities at arbitrary places and/or stages. This arbitrary location and/or phase can be designated, and can be changed based on the current manufacturing environment. These analytics algorithms may include, for example:
Also in a flexible environment, product adaptations can trigger certain tasks to achieve a seamless adaptation to a product or a product variant within the manufacturing environment.
By doing this, the autonomy of multiple automated production lines and/or a factory as a whole can be enhanced. The present invention allows for a system to be configured to adapt to new situations. This increases the autonomy and flexibility of production. The invention allows for a reduction in the number of resources required to perform measurements or quality control, while still maintaining or improving productivity and quality.
In an embodiment of the invention, the machine-learned system can detect a deviation in the workpiece’s real-world properties from the required ones based on a measurement. This machine-learned system can trigger an autonomous action based on what it has learned. Re-measurement with a more accurate and sophisticated sensor unit. By a mobile CMM. Or by ordering a robot to bring the piece to a CMM that is stationary. These CMMs will also be automatically deployed and assigned a task to measure the deviating feature. A second action would be to automate the adjustment of the machinery that is responsible for the deviation. This could optimize the process, e.g. The deviation can be minimized by re-supplying the deviating work piece back into an earlier stage in the production line. Re-supplying the deviating piece of work back to a previous stage in the production can be another action. This re-supplying could include an automatically generated task that fixes the deviating piece of work, for example. Re-machining the work piece, or a portion of it. This action may not only be involving the edge computing units but also higher-level instances, a Cloud system, etc.
Click here to view the patent on Google Patents.
Leave a Reply