Invented by Emilio Frazzoli, Baoxing Qin, Motional AD LLC
Autonomous vehicles rely on advanced technologies such as artificial intelligence, machine learning, and computer vision to perceive and understand their surroundings. However, these technologies are primarily designed to recognize and respond to known objects and scenarios. When faced with unknown objects or situations, autonomous vehicles need to have the capability to plan and make informed decisions to ensure the safety of passengers and other road users.
The market for planning unknown objects by autonomous vehicles encompasses various sectors, including transportation, logistics, delivery services, and public transportation. In the transportation industry, autonomous vehicles are being used for ride-sharing services, reducing the need for human drivers and providing a cost-effective and efficient mode of transportation. These vehicles need to be equipped with robust planning algorithms to handle unexpected obstacles or objects that may appear on the road.
Similarly, in the logistics and delivery sector, autonomous vehicles are revolutionizing the way goods are transported. These vehicles can navigate through complex environments, such as warehouses or distribution centers, and plan their routes to optimize efficiency and minimize the risk of collisions. Planning unknown objects is crucial in this context, as the vehicles need to adapt to dynamic environments and avoid obstacles that may not be present in their pre-programmed maps.
Public transportation is another sector that can greatly benefit from the market for planning unknown objects by autonomous vehicles. As cities strive to improve their transportation systems, autonomous buses or shuttles can provide a sustainable and efficient solution. These vehicles need to be capable of planning routes and adapting to changing road conditions, including unexpected objects or obstacles that may appear on the route.
The market for planning unknown objects by autonomous vehicles is driven by the need for enhanced safety, efficiency, and reliability in transportation. Companies specializing in autonomous vehicle technology are investing heavily in research and development to improve the capabilities of their vehicles in handling unknown objects. Advanced sensors, such as LiDAR and radar, are being integrated into autonomous vehicles to enhance their perception and recognition capabilities.
Moreover, collaborations between autonomous vehicle manufacturers and technology companies are driving innovation in this market. Partnerships with mapping and localization companies enable autonomous vehicles to access real-time data and updates about road conditions, construction sites, or accidents, allowing them to plan their routes accordingly.
In conclusion, the market for planning unknown objects by autonomous vehicles is witnessing significant growth as the demand for efficient and safe transportation solutions increases. With advancements in technology and collaborations between industry players, autonomous vehicles are becoming more capable of navigating and planning routes in unfamiliar environments. This market holds immense potential for various sectors, including transportation, logistics, and public transportation, and is expected to continue expanding in the coming years.
The Motional AD LLC invention works as follows
The model of the vehicle’s environment is also maintained. The model includes a hypothetical object that is not visible to the sensors of the vehicle.
Background for Planning unknown objects by autonomous vehicles
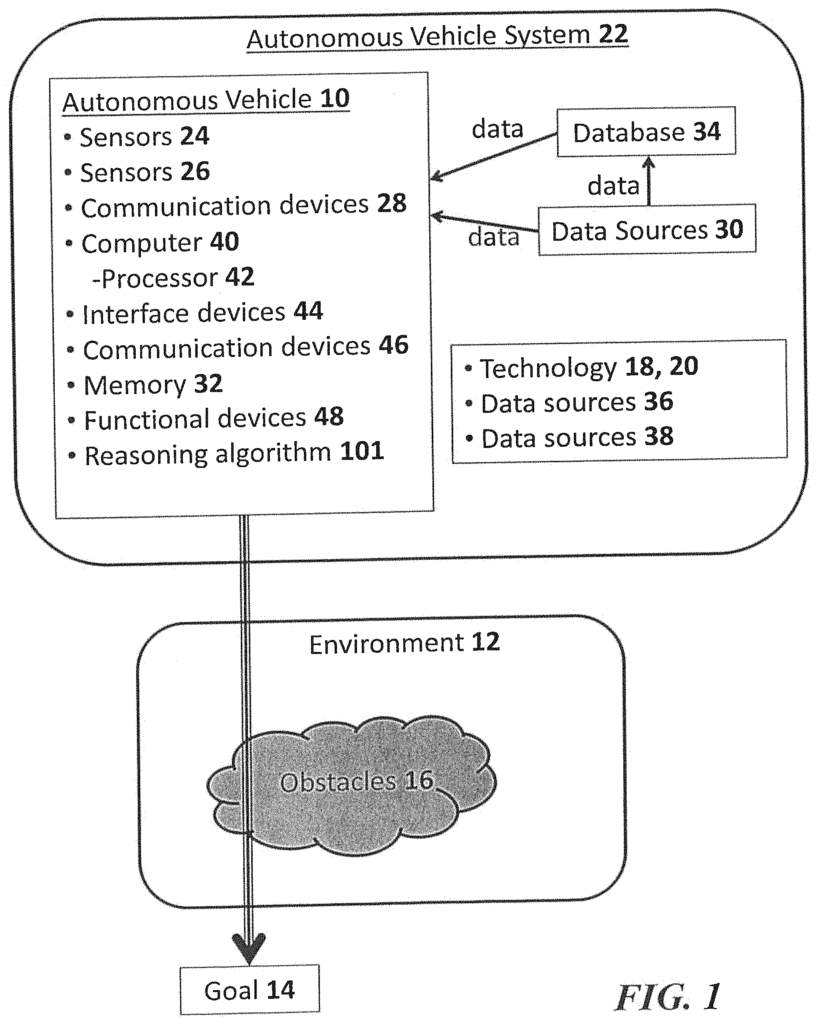
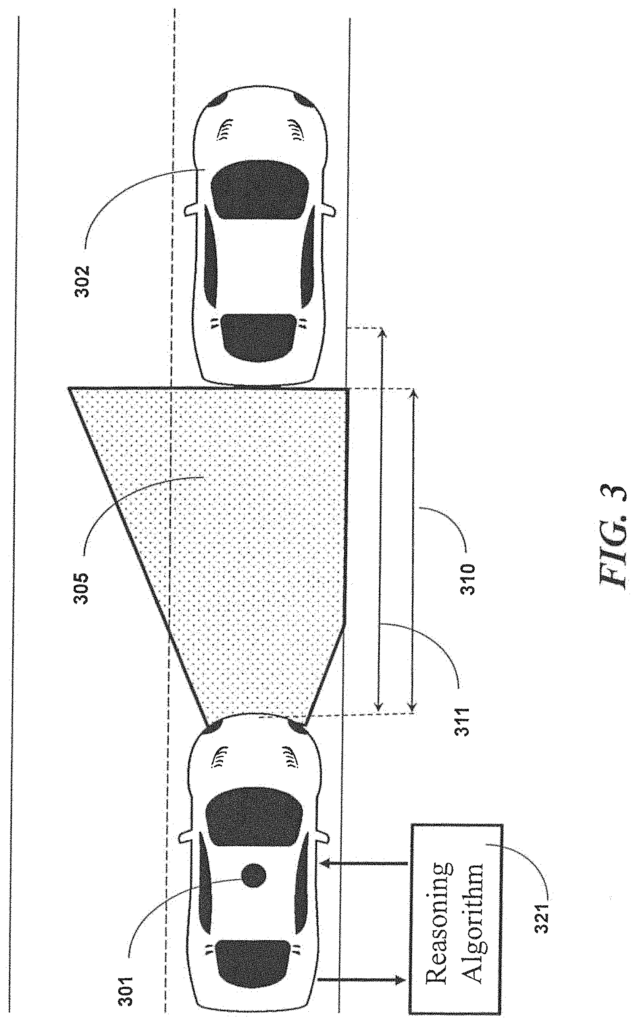
In making driving decisions, autonomous vehicle systems (AVs) typically take into account objects such as other vehicles or obstacles that the AV knows are present in its environment. This can be because sensors on the AV have observed the objects or because they are identified through maps or other sources of data. For driving decisions, AV systems can maintain world models which include objects that are known to exist in the AV environment. The AV system may have difficulty making good decisions when it cannot see vehicles or obstacles.
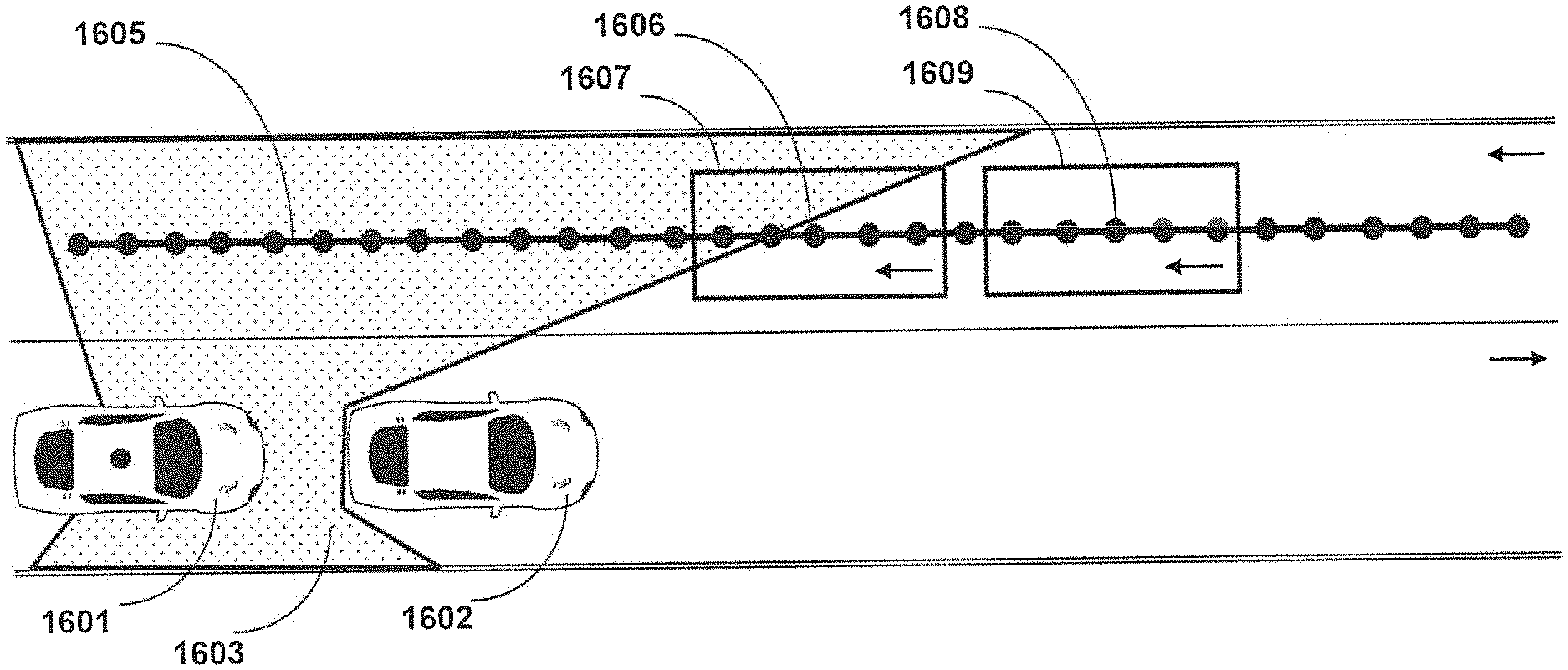
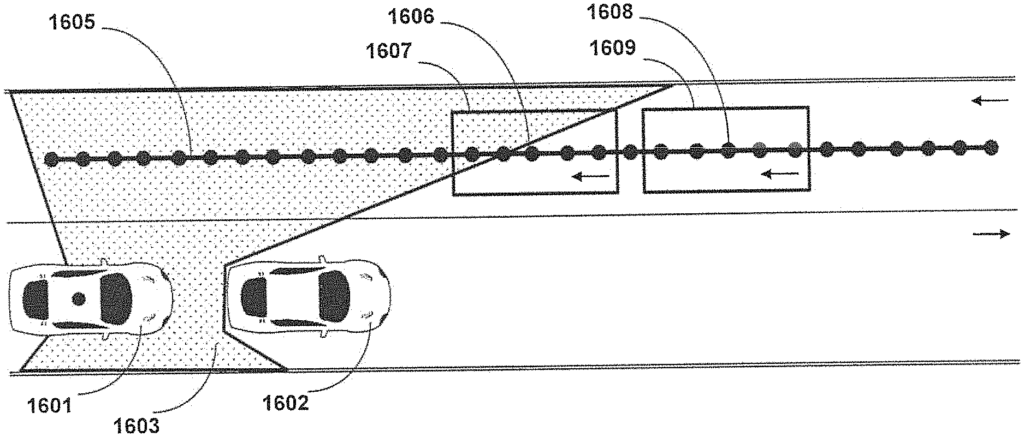
The technologies described in this document allow an AV to plan for the risks associated with unknown objects in its environment. The AV system can then make driving decisions, including driving decisions that are relatively safer in light of potentially dangerous scenarios?that account for the unknown possible items in its environment. In some implementations, the AV system will determine the boundaries between the perceived and unperceived parts of the world model. The AV system hypothesizes then the presence or attributes possible unknown objects. The AV system then hypothesizes the presence or attributes of possible unknown objects (which we sometimes call?dark objects? The hypothetical objects with their attributes will be added to the model of the world for the purpose of making decisions that take into account not only the objects known in the perceivable worlds, but also unknown objects or dark objects in the unperceived ones.
In general, the world model of a vehicle’s environment is maintained in one aspect. The world model is maintained by accessing a database containing information about the road network, using data from sensors or both. The world model contains a hypothetical object that is not visible to the sensors of the vehicle. The hypothetical object can be a moving object or an object using a route of travel that is not accessible to the vehicle, or both. The hypothetical object can include at least one of: a second car, a bike, a bus or train, a pedestrian and an animal. In order to include the hypothetical objects in the world model, it is necessary to select a type and attribute of the object based on a probabilistic analysis of other objects in the environment. The attribute can be either a size, a speed, or both. The world model includes in the environment one or more objects that have been perceived by the sensors of the vehicle, or which are known. The world model maintains both the hypothetical objects and known objects in different areas of the environment. The different parts of an environment are a perceived and unperceived universe. A boundary separates the perceived world from the unperceived.
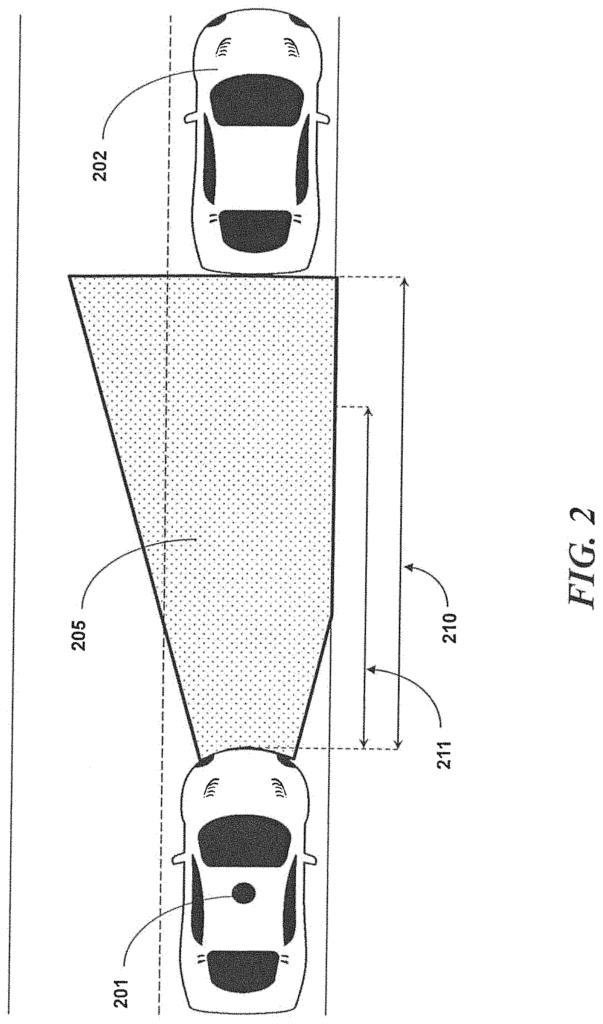
Implementations can include detecting the boundary. The data from one of more sensors is used to detect the boundary and distinguish between the visible ground and a foreground which obscures part of the ground. One or more sensors can be sensors onboard the vehicle or sensors outside the vehicle.
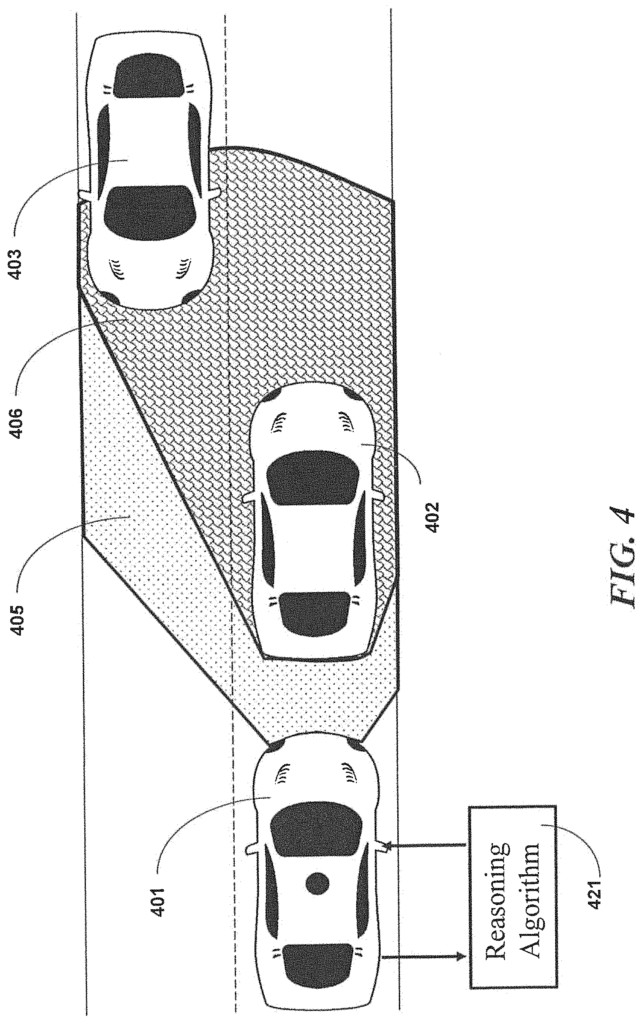
The location of the ego car is determined using a database of road networks and one or several sensors. The information on traffic lanes is also retrieved from a database of the road network. The stored data from databases or sensors can be used to determine a possible position of the hypothetical object. The location of hypothetical objects can be determined by querying traffic information from a data base and discretizing it into discretized points. Implementations can generate an unknown skeleton from discretized points that are not visible to sensors on the vehicle. The world model generates the hypothetical object by iterating through discretized points. This involves generating a shape representative at a discretized skeleton point and evaluating if the shape representative is fully within the unperceived environment. If the representative form is fully within the unperceived universe, the shape will be treated as a hypothetical object.
Implementations can use temporal filtering in order to find the location of a hypothetical object. The filtering includes smoothing an unknown unknown skeleton using a forward propagated undecided skeleton.
The hypothetical object is associated with either one or two attributes.” One or more attributes relate to the possible motion state of a hypothetical object. The motion state can be either a stationary or moving condition. It could also be a speed or moving direction. The speed must be less than or equal a maximum value. The predetermined value is a speed limitation. In some cases the predetermined value is derived from a number of objects observed simultaneously or previously in the environment. The predetermined value can be a quantity that is derived from historical information, road configurations, traffic rules or an event.
The one or multiple sensors can include one or all of the following: A radar sensor, a Lidar sensor, or a Camera sensor. The camera sensor can be either a monocular or stereo camera sensor.
Implementations” update a vehicle’s trajectory based on a world model, and execute the trajectory. The vehicle is an autonomous vehicle.
In general, the data that represents an observable portion of an environment for a vehicle are received by a sensor. The data represents a non-observable environment. This includes at least one hypothetical Object in this non-observable environment. The commands for the operation of the vehicle in the environment are generated. Commands are generated based on data that represents the observable environment, and data that represents the hypothetical object within the non-observable environment. The moving object can be the hypothetical object. In some cases the hypothetical object is an object which uses a route of travel that excludes the vehicle. The hypothetical object may be at least one out of the following: a vehicle or bicycle, bus, train, pedestrian, or animal.
Implementations for generating data that represents a non-observable portion of the environment include selecting a type and attribute of the imaginary object probabilistically, based on previously observed objects in the environment. In some examples, a vehicle is the hypothetical object and the attribute includes a size and speed.
The boundary separates the observable and non-observable parts.” The technologies include detecting the boundary. The sensor data is used to differentiate the visible ground from a background that obscures part of the ground. The following data processing steps are used to generate data that represents the non-observable portion of the environment: (1) using data stored in the database to determine a possible location for the hypothetical object; (2) querying information about traffic lanes from a network database; (3) determining the location of a vehicle based on the database and the one or two sensors; (4) querying information about traffic lanes from a database discretizing the lane into discretized dots, (5) querying information and generating an unknown structure of discretized points from the database and a traffic lane from a database, a database, and discretizing a network database and a database, and discretizing a database, a database and discretizing a database, a database and a database discretizing a database discretizing a skeleton skeleton from the database, a skeleton skeleton skeleton skeleton from the database and a skeleton a lane a a a a lane a traffic lane lane a traffic lane a traffic lane a traffic lane a traffic skeleton a a traffic lane a traffic a traffic a traffic a traffic skeleton a traffic skeleton ad discretized discretized discretized discretized discretized discretized A representative shape can be used as the hypothetical object.
Implementations can use temporal filtering in order to find the location of a hypothetical object. The filtering includes smoothing an unknown unknown skeleton using a forward propagated undecided skeleton.
The hypothetical object has been assigned one or several attributes. One or more attributes relate to a hypothetical object’s possible motion state. The motion state includes one or more factors, including a stationary condition and a moving condition. The speed must be less than or equal a maximum value. A speed limit can be used as the predetermined maximum value. In some cases the predetermined value is derived from observing other objects in the same environment. The predetermined value can be determined from historical data, road layout, traffic rules or an event.
Implementations may include accessing data from a database containing information about the road network, or utilizing data from a secondary set of sensors or both. The sensor or second set of sensor includes one or more of: a radar, lidar, or camera sensor. A camera sensor can be either a stereo or monocular camera sensor.
The commands to operate the vehicle include updating the trajectory of the vehicle or executing it for the vehicle or both. The vehicle is an autonomous vehicle.
In general, the technologies in this aspect generate commands that cause an autonomous vehicle drive on a network of roads at specified speeds, and to make specified turns, to reach a target position. The commands update in response to the current data that represents a hypothetical moving direction and speed of a fictional vehicle driving on the road. The commands are then updated to reduce the risk of an autonomous vehicle colliding into another vehicle on a road network. Probabilistically, the hypothetical speed and direction of travel is derived from vehicles observed previously in the environment.
The boundary separates the observable and non-observable parts.” The implementations include the detection of the boundary. The boundary detection uses data from one of more sensors to differentiate an observable surface from a background that obscures part of the ground. One or more sensors can be sensors mounted on the autonomous vehicle or offboard sensors.
The current data that represents a hypothetical moving direction and speed of a vehicle can be generated by using known objects detected by one or multiple sensors. The data generation may include one or more operations, such as querying traffic information from a database of road networks, using stored data inferring a possible position of the hypothetical car, or determining the location of an autonomous vehicle by using a database of road networks and one or several sensors. The process of inferring a possible location for the hypothetical vehicle involves querying traffic information from a data base and discretizing a traffic lane into discretized spots, creating an unknown skeleton using discretized points that cannot be detected by sensors, generating representative shapes at discretized points on the unknown skeleton and evaluating whether the representative shape is entirely within the unperceived environment. “A representative shape in the unperceived environment is treated as a hypothetical vehicle.
The technologies can use temporal filtering in order to locate the hypothetical vehicle. The filtering procedure smooths an unknown by using a forward propagated skeleton.
The hypothetical vehicle has been assigned one or several attributes. One or more attributes relate to a hypothetical vehicle’s possible motion state. The motion state includes a stationary condition. The speed of the hypothetical car is less than or equal a maximum value. The maximum value can be either a speed limitation or a quant computed. Quantity can be calculated from objects observed simultaneously or in the past. The quantity can be calculated from historical data, road layout, traffic rules or an event.
Click here to view the patent on Google Patents.
Leave a Reply