Invented by Jerald Edward Jones, Valerie Lisa Rhoades, Todd Earl Holverson, John Henry Gaffney, III, Mark Dietrich Mann, Adam Nathan Cuneo, Illinois Tool Works Inc
Virtual reality-controlled mobile robots are autonomous machines that can be controlled remotely through virtual reality headsets. This technology allows users to immerse themselves in a virtual environment and control the robot’s movements and actions as if they were physically present.
One of the key advantages of virtual reality-controlled mobile robots is their versatility. They can be used in a wide range of applications, including healthcare, manufacturing, logistics, and entertainment. In the healthcare industry, these robots can be used for remote surgeries, allowing surgeons to operate on patients from a different location. They can also be used for patient monitoring and assistance, providing healthcare professionals with real-time data and allowing them to remotely interact with patients.
In the manufacturing industry, virtual reality-controlled mobile robots can be used for tasks such as material handling, assembly, and quality control. They can navigate through complex environments and perform repetitive tasks with precision and efficiency. This not only improves productivity but also reduces the risk of human error and injuries.
In the logistics industry, these robots can be used for warehouse management, inventory tracking, and order fulfillment. They can navigate through narrow aisles, pick and pack items, and deliver them to the desired location. This automation not only speeds up the process but also reduces labor costs and improves overall efficiency.
Furthermore, virtual reality-controlled mobile robots have also found applications in the entertainment industry. They can be used in theme parks, museums, and virtual reality arcades to provide immersive experiences to visitors. These robots can simulate various scenarios, allowing users to explore virtual worlds and interact with virtual objects.
The market for virtual reality-controlled mobile robots is expected to continue growing in the coming years. According to a report by MarketsandMarkets, the market is projected to reach $7.7 billion by 2025, with a compound annual growth rate of 24.7% from 2020 to 2025. The increasing adoption of virtual reality technology, coupled with the need for automation and remote operations, is driving the demand for these robots.
However, there are still challenges that need to be addressed for wider adoption of virtual reality-controlled mobile robots. One of the main challenges is the high cost of the technology. Virtual reality headsets and the associated software can be expensive, making it difficult for small businesses to invest in this technology. Additionally, there are concerns regarding privacy and security, as these robots collect and transmit sensitive data.
In conclusion, the market for virtual reality-controlled mobile robots is expanding rapidly, driven by advancements in technology and the increasing demand for automation and remote operations. These robots have a wide range of applications in various industries, offering improved efficiency, productivity, and immersive experiences. As the technology becomes more affordable and security concerns are addressed, we can expect to see even greater adoption of virtual reality-controlled mobile robots in the future.
The Illinois Tool Works Inc invention works as follows
In certain embodiments, the portable metalworking robot system comprises a metalworking tool that is configured to perform metalworking processes on one or more parts. The portable metal robot system also includes communication circuitry that is configured to receive signals from a remote control system. The portable metalworking robot system includes control circuitry that is configured to control the operational parameters of portable metalworking robot system according to the received control signals.
Background for Virtual reality controlled mobile robot
The present disclosure is aimed at automating welding and metal-cutting processes, including using portable robots, and human-in-the loop. “The present disclosure relates to welding and cutting in general, more specifically automated welding and metal cutting processes and systems using robotic manipulators including portable robots and a?human-in-the loop?
Metals are used as structural materials in most fabrication. Metal cutting and welding are the primary processes in fabrication of many products and components, including automobiles, wind turbines, cars, pipes, ships and tanks. Automated systems will become necessary to meet the increasing demands for quality and productivity. Robot systems are used in many fabrication processes today by the manufacturing industry. Shipbuilding is a major industry for fabricating, so examples of shipbuilding are included in the description. Other industries that fabricate may also benefit from robotic systems.
BRIEF DESCRIPTION
In certain embodiments, the welding or cutting system comprises a robot manipulator and a torch for welding or cutting, as well as a robot, a control system and one or more sensor. The robot manipulates the welding or chopping torch so that the welding electrode, for instance, is pointing toward the weld joint. The robot moves the cutting or welding torch along the joint to weld, or to cut. As the torch moves along the joint to weld, or to cut the angle is adjusted to produce the desired weld. Human operators can control the robot movement and angles of the cutting or welding torch. One or more sensors track the movement of a control device. A computer program calculates the motion of the device. The robot will then be instructed to move the cutting or welding torch in the same directions, angles and speeds as the control device was being moved by a human. A video camera or cameras are also attached to the robot to capture images of both the cutting or welding torch as well as the joint being welded or cut. The video data is sent to a computer software, which then displays it as an image. A system like this can be referred to as a “human-in the-loop”. The video display provides the human operator enough information to guide robot motion and the cutting or welding torch just like if the operator held the cutting or welding torch instead of the robot.
DRAWINGS
The following detailed description will help you better understand the features, aspects and advantages of this disclosure when read in conjunction with the accompanying drawings. Like characters are used to represent similar parts on all the drawings.
FIG. “FIG.
FIG. “FIG. According to embodiments of this disclosure, 1A also includes other components related to the welding or the cutting robot.
FIG. “FIG. According to embodiments of the disclosure, FIGS.
FIG. “FIG. According to embodiments of the disclosure, 3B is a perspective view of a local control system configured to remotely control the welding or cutting robot illustrated in FIG.
FIG. “FIG. According to embodiments of the disclosure, FIG. 3A shows a perspective view of a welding or cutting robot being remotely controlled by a local control system.
FIG. “FIG.
FIG. “FIG.
FIG. “FIG.
FIG. “FIG.
Below, we will describe one or more embodiments. To provide a concise and complete description of the embodiments, not all features of a real implementation will be described. It should be appreciated that in the development of any such actual implementation, as in any engineering or design project, numerous implementation-specific decisions must be made to achieve the developers’ specific goals, such as compliance with system-related and business-related constraints, which may vary from one implementation to another. It should also be noted that, while such a project might be time-consuming and complex, it would be routine for anyone with ordinary skills who had the benefit of disclosure.
When introducing elements from various embodiments, the articles?a? ?an,? ?the,? ?said? and?the? are intended to indicate that there are one or more elements. imply that one or more elements exist. The terms ‘comprising,’? ?including,? ?Including,? These terms are meant to be inclusive. They may include additional elements.
Manual welding is expensive, and welders are paid more than other skilled workers. The welding equipment also has to accommodate the human limitations, such as the ability to lift a torch and hold it for an entire shift. The welder is required to stand, sit or lie down at all times in order to perform the welding process. Welding produces high intensity lights, so welding requires a mask. Welding also produces fumes and sparks that are superheated, as well as hot metal pieces. The weather and other factors, like these, can lead to fatigue, which can reduce productivity. The robot system can deposit more weld metal in a shorter time with the heavy water-cooled torch. This welding torch, however, is heavy, has thick copper cables, and is therefore not suitable for manual usage. It is either impossible or prohibitively costly to create a perfect joint in welding. This is necessary for pre-programmed robots. A human welder with a good level of skill can manipulate a torch easily by adjusting the angles, welding speed and torch position. They will still be able to produce a quality weld. “A robot controlled by a human skilled in welding can produce high-quality welds, and the robot will carry the torch weight which allows for faster welding.
By combining the welding skills and sensory capabilities of a welder, with the lifting capability and speed of a robotic welder, it is now possible to weld at levels of productivity that are several times higher than a welder. This system is justified by the high-quality welds produced and the high levels of productivity. It is also relatively expensive to develop robot control programs, and to use the heavy and accurate fixturing required to position the parts that are to be welded at the exact location where the robot is programmed. The costs of robots can only be justified when the robot is producing large numbers of parts. For example, if it’s making parts for automobiles, where production includes several tens or thousands of cars. Manual welding is used instead of robotics when there are fewer parts and the cost to form or machine each part precisely is too expensive. Manual welding requires a welder at the weld to have the ability to manipulate the welding torches, angles and location. The robot welder must have the same three-dimensional visual environment to be able to produce high-quality welds.
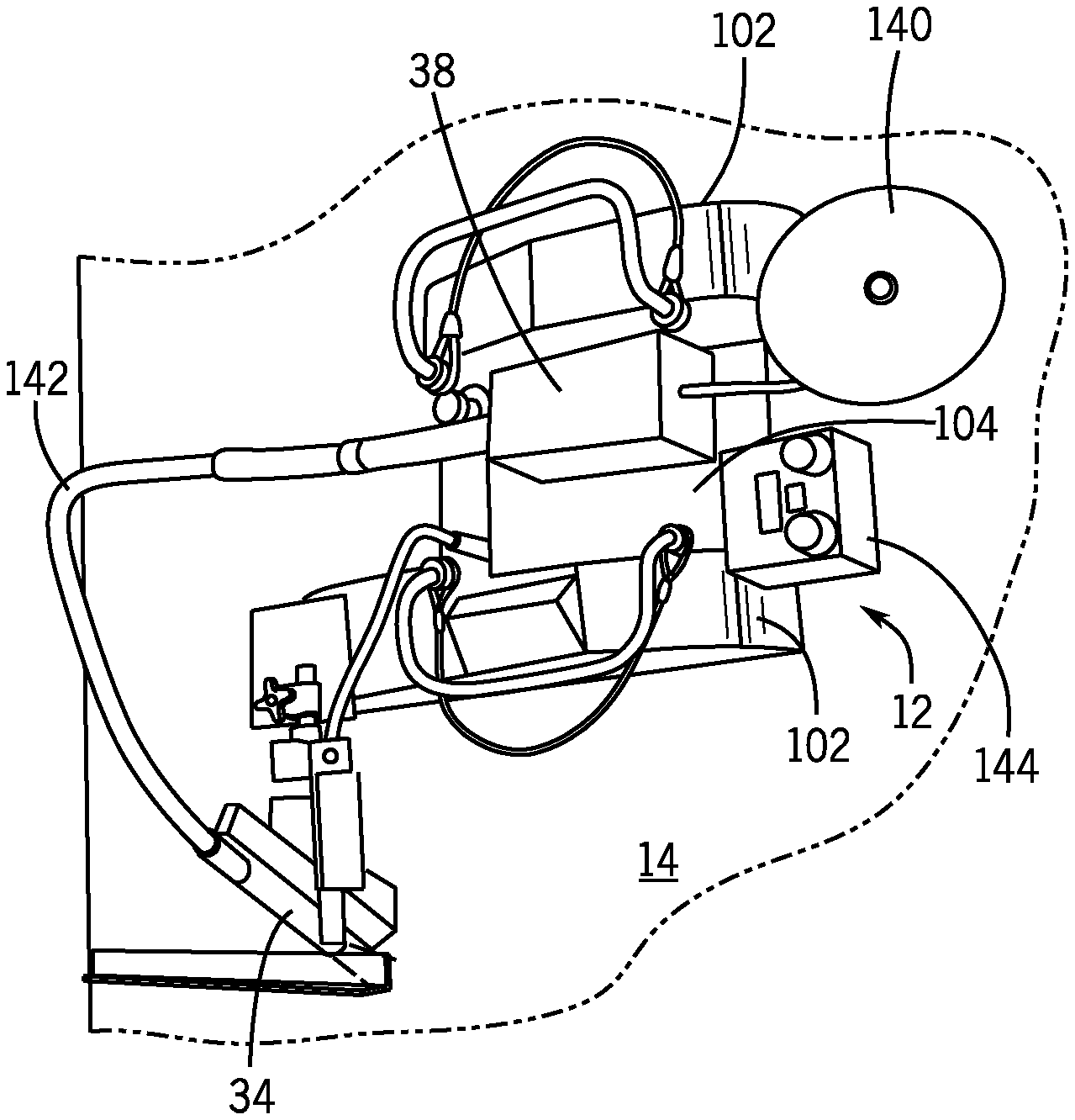
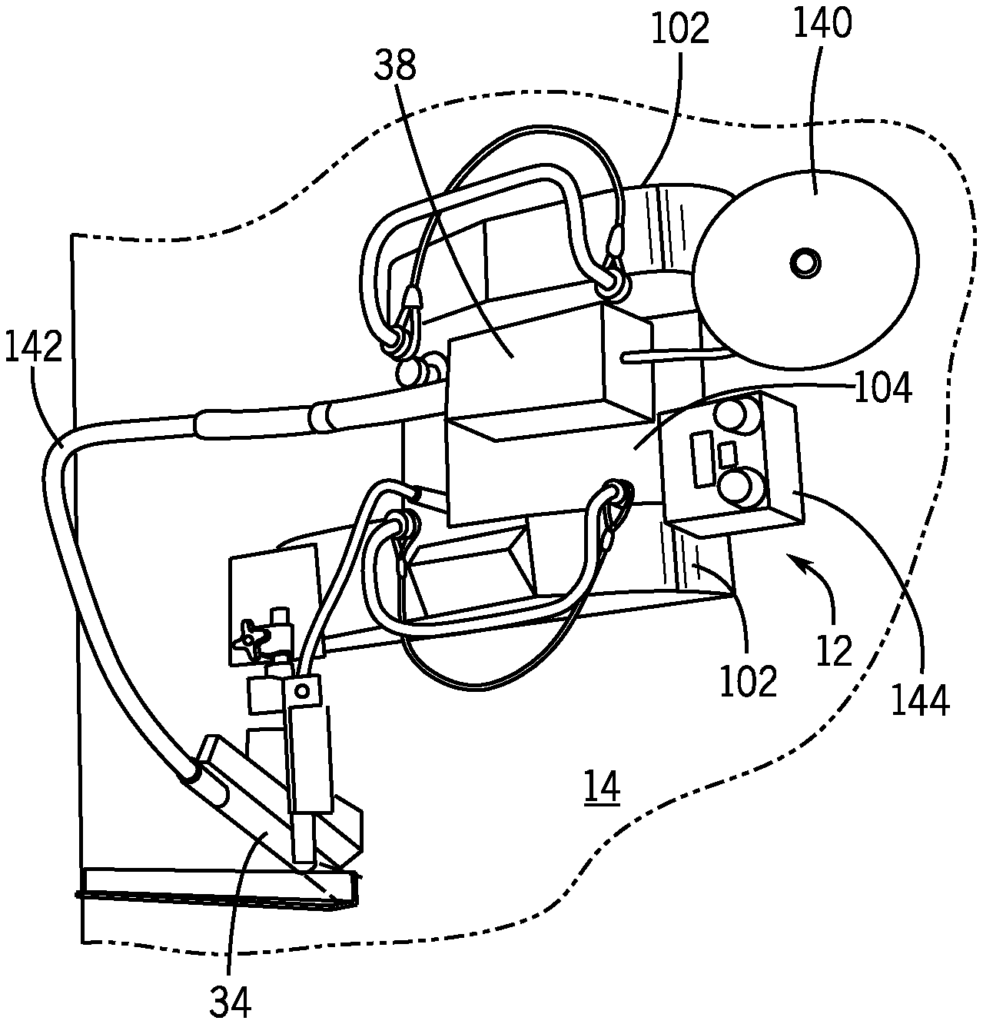
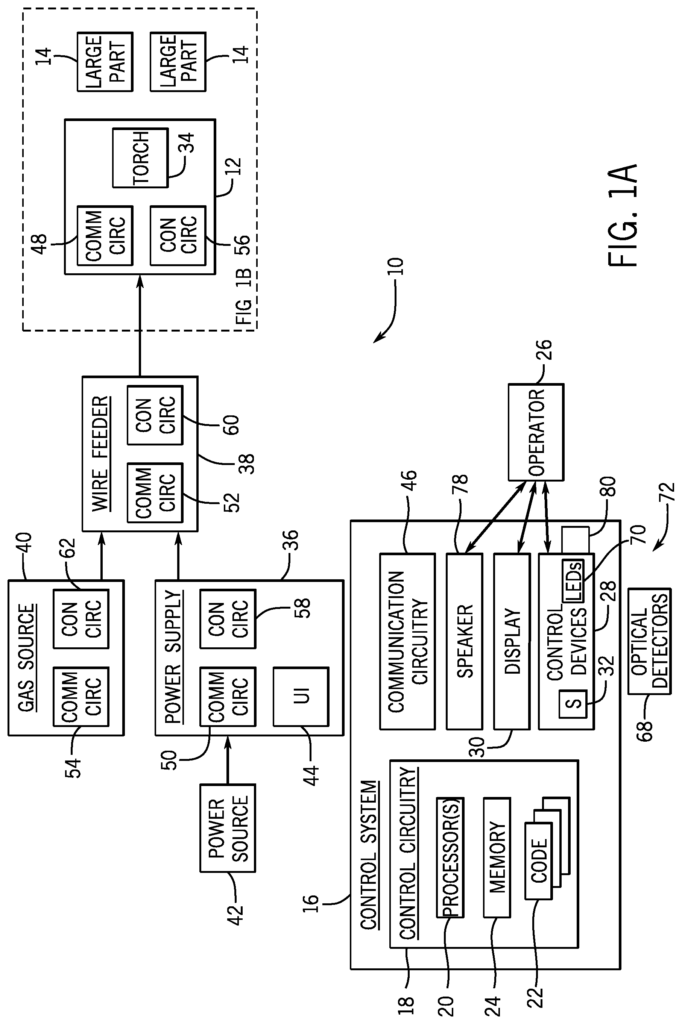
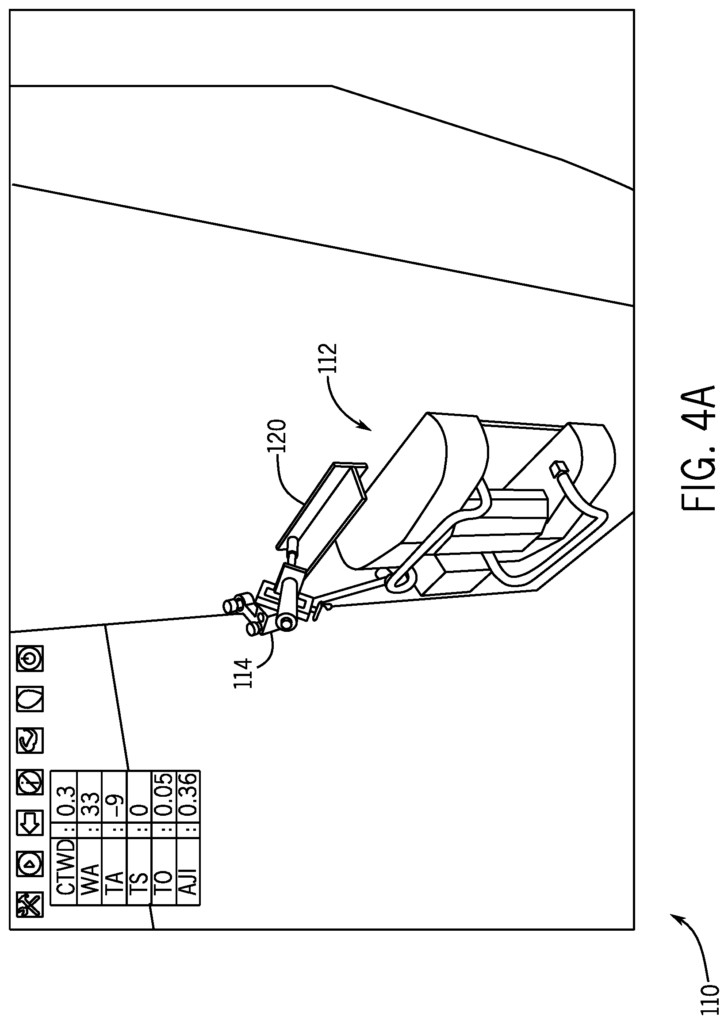
FIG. The schematic diagram 1A shows an embodiment of the system 10 that facilitates virtual reality assisted (or enhanced reality assisted) control over a portable cutting or welding robot 12 capable of performing a cutting or welding process on large pieces 14, such as ship panels assembled during a shipbuilding procedure. The portable remote controlled robot embodiments are described primarily as being related to welding or cut robots 12, i.e. performing welding or plasma-cutting operations. However, other metalworking processes such as induction heat (or other types such as laser heating or infrared heat) may also benefit. In certain embodiments, for example, a portable heating robot with an induction head can be controlled similarly to the portable welding or cut robot 12 described in this document. While the present invention is primarily described as a virtual reality-assisted control of the cutting or welding robot 12, other embodiments may use augmented reality representations instead. Instead of displaying virtual reality views of the cutting or welding process, video captured from the process can be enhanced with virtual reality elements.
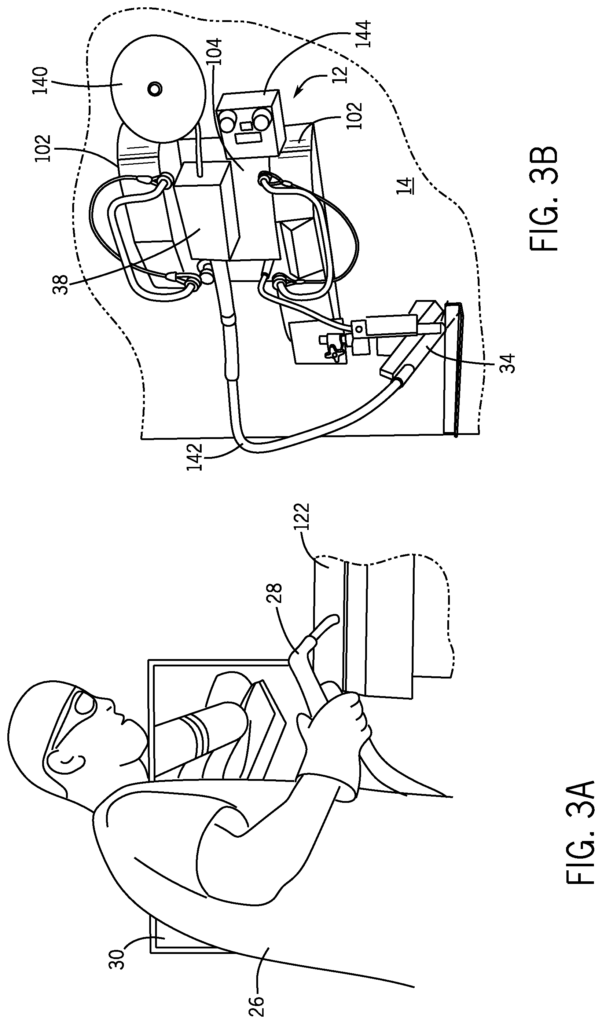
As shown in FIG. The system 10 comprises a control system 16, which includes control circuitry 18. In certain embodiments, this control system may include one or multiple processors 20, configured to execute executable computer codes 22 stored on one or more memory devices 24. The computer readable instructions are executable in certain embodiments to facilitate remote controlling of the welding or chopping robot 12. For example, they can present a virtual reality or augmented reality environment to the operator 26 and receive control inputs via one or more devices 28. In certain embodiments, the control circuitry of the control system 16 may display a virtual (or enhanced) reality representation of a welding or a cutting robot 12 performing an operation on the virtual (or enhanced) reality representation of parts 14. The display device 30 can include, in certain embodiments: a computer monitor or multiple monitors (each displaying a portion of the virtual/augmented representation), virtual/augmented goggles, virtual/augmented glasses, etc.
Click here to view the patent on Google Patents.
Leave a Reply