
Invented by Ram SUBRAMANIAN, Louis J. Serrano, Matthew A. Younkins, Tula Technology Inc
The Tula Technology Inc invention works as follows
The present invention is concerned with techniques that improve fuel efficiency in vehicles powered by internal combustion engines capable of operating on different displacement levels. The autonomous driving unit, or cruise control, selects the engine torque output which corresponds with a fuel-efficient displacement level. The resulting vehicle speed profile, and NVH levels are acceptable to the vehicle occupants.

Background for Autonomous Driving with Dynamic Skip Fire
The present invention is a technique for increasing fuel efficiency in an engine. In one case, it was found that a slight reduction in the engine torque can result in a disproportionally higher fuel saving by using a lower effective displacement. These techniques are especially well-suited to implementation in autonomous vehicles.
Recently, extensive efforts have been made to develop passenger cars with the capability to drive autonomously. While fully autonomous vehicles aren’t commercially available yet, there have been huge advances in their development. It is expected that the self-driving vehicle will become a reality in a relatively short time.
Most vehicles (and other devices) in use today are powered by internal-combustion (IC) engines. Internal combustion engines are usually equipped with multiple cylinders, or working chambers in which combustion takes place. In normal driving conditions, an internal combustion motor’s torque must vary across a large range to satisfy the demands of the driver. By varying the displacement, the fuel efficiency of many internal combustion engines can significantly be improved. It allows the engine to deliver the maximum torque when needed, but can reduce pumping loss and improve fuel economy by using a smaller displacement. Deactivating several cylinders at once is the most common way to change displacement. This method involves delivering no fuel to the deactivated engines and keeping the intake and exhaust valves closed for as long as they remain deactivated.
Skip fire” is another engine control method that changes the displacement of an engine. engine control. Skip fire engine control is a method of selectively skipping certain cylinders at selected firing times. So, for example, a cylinder can be fired in one engine cycle. It may then be skipped in the next cycle. Then it may be selectively skipped again during the following cycle. Skip fire engine control is different from the conventional variable displacement engine controls where a set of cylinders will be deactivated simultaneously, and they remain deactivated for as long as the engine stays in the same displacement mode. The sequence of cylinder firings is always the same during each engine cycle when the engine is in a particular variable displacement mode. An 8-cylinder variable displacement motor, for example, may deactivate the half of its cylinders. It will then only use the 4 remaining cylinders. Typically, commercially available variable displacement engine models available today support two or three fixed displacement modes.
Skip fire engine operation allows for a finer control over the engine displacement in general than can be achieved using a traditional variable displacement method. In a 4-cylinder engine, for example, firing each third cylinder would result in an effective displacement equal to?rd the engine’s full displacement. This fractional displacement is impossible to achieve by deactivating just a few cylinders. In theory, skip fire control can achieve virtually any displacement, but in practice, most implementations limit the number of firing fractions, patterns, or sequences that are available. The Applicants have filed several patents that describe various approaches to skipping fire control. U.S. Nos. Nos. 7,849 835; 7,886,715 ; 7,954,474 ; 8,099 224 ; 8,131 445 ; 8,131 447 ; 8,464,690 ; 8,616,181 ; 8,839 766 ; 8,869 773 ; 9,086,020 ; 9,120 478 ; 9,175,613 ; 9,200 575 ; 9,291,106 ; 9,399 964, and others describe “Each of these patents are incorporated by reference.
The Applicant filed several patents that describe various ways to bypass fire control. U.S. Nos. Nos. 8,099 224; 8,464,690, 8,651,091 8,839 766, 8,869 773 9,020,735 9,086,020 9,120,478 9,175,613 9,200 575, 9,200 587, 9,291,106, 9,399 964, and others describe engine controllers which make it possible to operate many internal combustion engines using a dynamic skipped fire mode. These patents are incorporated by reference. These patents are mainly related to dynamic skip control, where firing decisions about whether to skip or to fire a cylinder in a working cycle is made in real-time.
In some applications, referred to by the name dynamic multi-level skipping fire, it is possible for individual working cycles to be fired at different output levels. This means that different levels of air charge, and fueling, can be used. U.S. No. Some of these approaches are described in 9,399,964. The concepts of individual cylinder control used in dynamic skip-fire engine operation can be applied to dynamic multiple-charge level engines in which all the cylinders are operated, but each working cycle is purposely operated with different output levels. Both dynamic skip fire and dynamic multiple-charge engine operation can be viewed as different types of dynamic firing levels modulation engine operation, in which each working cycle’s output (e.g. skip/fire, low/high, skip/high/low etc.) is determined dynamically during operation. Dynamically determined during engine operation, usually on an individual working cycle basis (firing chance by firing opportunity). Dynamic firing level engine operation should not be confused with conventional variable displacement, where a set of cylinders is operated in a similar manner when the engine enters reduced displacement mode.
The present application describes various techniques through which fuel efficiency can be improved in vehicles, and especially autonomous vehicles. This is done by using skip fire, dynamic level modulation of firing levels and other variables displacement considerations when determining a drive profile.
A variety, of methods, controllers, and algorithms, for determining a operational engine torque which offers better fuel efficiency than a requested torque, while delivering performance at least as close as what would be achieved by operating at the requested torque. The described devices and methods are well-suited to use with autonomous vehicles.
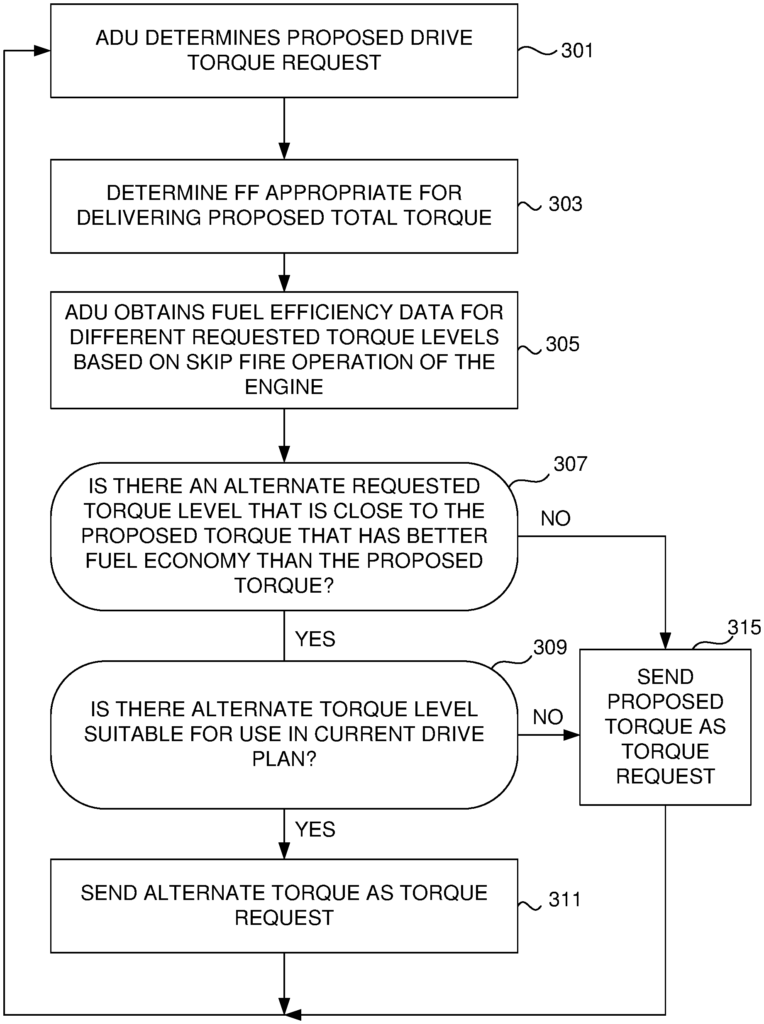
In one aspect, the most fuel-efficient proposed effective operational displacement for delivering desired engine output is determined from a plurality potentially available effective operating displacements that are suitable for delivering desired engine output. Then, it is determined if there is an engine torque with a higher fuel efficiency than the engine torque desired, and the engine torque alternative is close but different from the engine torque desired. If it is determined that there is an alternative engine that is more fuel efficient than the desired engine and suitable for current usage, the engine is directed to deliver that alternative engine torque.

In some embodiments, it is determined whether an alternative effective operating displacement is available for use in current operating conditions that can deliver close to the desired torque of the engine with better fuel efficiency than the proposed effective operation displacement. The engine is then operated at an alternative effective operating displacement that delivers an engine output close to, but lower than the desired engine output.
In another aspect, an autonomous driving system is configured to determine the requested torque by using fuel economy data associated with different operational effective displacements. In some embodiments the collective fuel efficiency of several vehicles in a platoon can be used to determine an operational effective displacement.
In another embodiment, an automated vehicle is configured to run its engine at a level of displacement that maximizes fuel efficiency while maintaining the vehicle’s operation within a range and providing acceptable NVH qualities.
The engine controller determines the engine torque requested/desired based on driver input (e.g. accelerator pedal position) plus the load applied by any ancillary devices (e.g., air conditioner, alternator/generator, etc.). The autonomous driving unit may request the torque in a self-driving vehicle. The skip fire controller determines the firing fraction/pattern that is appropriate to deliver the torque requested during operation. This often takes into consideration other engine or vehicle parameters, such as the engine speed, gear ratio, vehicle speed etc. In certain circumstances, environmental variables such as road roughness and ambient noise levels can also be used to determine the desired firing pattern/fraction. The current state of the art for firing fraction selection is to select the fuel optimal fraction that delivers the desired torque while meeting the designated NVH requirements and drivingability.
In most cases, lower firing densities patterns/fractions are more fuel-efficient than patterns/fractions with higher firing densities. One common method is to choose the lowest firing percentage that will deliver the engine torque requested while still meeting the drivability and/or design requirements.
It is thought that automakers will be very reluctant to implement power-delivery schemes that give drivers less power than what they request in these types of situations. The perception is that the driving experience may be compromised if the desired amount of torque is not delivered. As a result, the driver may change the torque request (for example, pressing the accelerator pedal harder if there is too little torque). It is difficult to deliver torque efficiently because of this reaction. In autonomous driving, passengers may not be as concerned with such minor variations. Therefore, such a compromise could be acceptable for an ADU. The ADU will be able to improve fuel efficiency in such cases by taking into account the fuel efficiency implications of the torque request. The same considerations for fuel efficiency can also be used to determine the torque requested during normal (non-autonomous driving) if the tradeoffs are acceptable to the designer/driver. This application describes techniques for improving fuel economy by taking advantage of these types of tradeoffs?particularly during autonomous driving.
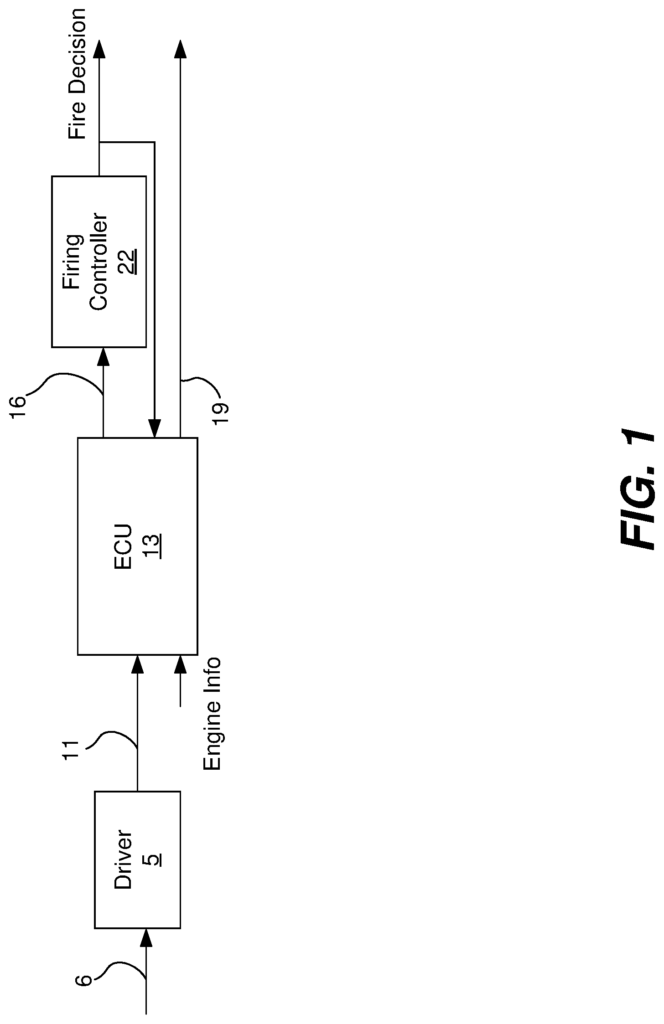
Referring to the next figure, FIG. The logic behind the current state-of-the-art, skip fire engine will be explained in detail. In the illustrated embodiment a driver 5 processes and senses real-world information 6 before depressing an accelerator pedal in order to control the engine output. A skip fire engine controller (ECU) 13 may treat the accelerator pedal position as a torque demand 11. The ECU 13 selects a firing fraction 16, and other parameters associated with the vehicle and engine 19 (such as torque converter slippage, transmission gear, throttle, valve timing etc.) that will deliver the torque requested. A firing controller 22 uses the selected firing fraction 16 to determine when specific firings will occur. The firing decisions are sent to the skip engine controller, which can use the knowledge of specific firings decisions for the control of engine, powertrain and vehicle parameters based on specific firings decisions or cylinder firing histories. Examples of parameters that will be affected by specific firing decisions and/or firing history include valve control to control cylinder deactivation/activation, fuel injection decisions, injected fuel mass, and spark timing.
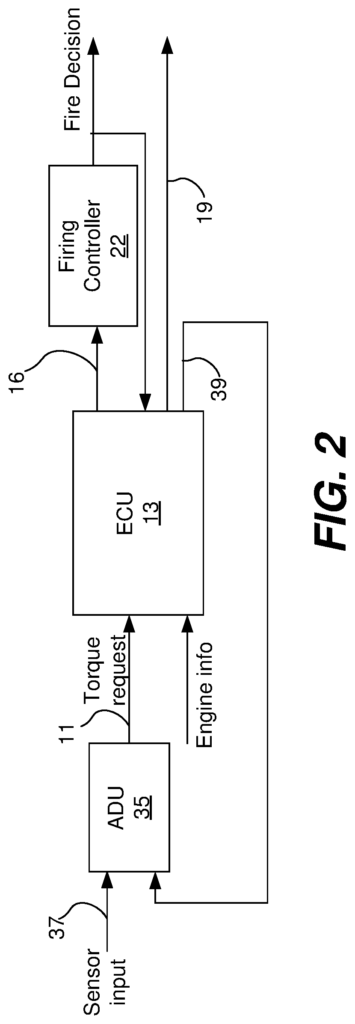
FIG. The following is a high-level overview of the logic for autonomous driving control that uses skip fire engine controls in accordance with a particular embodiment which is generally analogous FIG. 1. In this embodiment, the ADU 35 replaces the driver by receiving inputs 37 via sensors or other sources which sense information about its local environment. These inputs can include information obtained from other vehicles or from a GPS system, traffic signals, etc. The ADU calculates driving torque requests using its proprietary algorithms. In certain embodiments, ADUs are capable of controlling the entire operation of a vehicle in self-driving modes. It can be a full trip planner in a driverless car, or a mode of autopilot in a car that can operate manually. ADUs can include any device or mode which determines driving torque. In this embodiment, an advanced cruise-control device, for example, can be used as an ADU, because it controls the driving torque demand.
Click here to view the patent on Google Patents.