Invented by Brian M. Fields, Joseph P. Harr, Jeremy Myers, State Farm Mutual Automobile Insurance Co
The State Farm Mutual Automobile Insurance Co invention works as follows
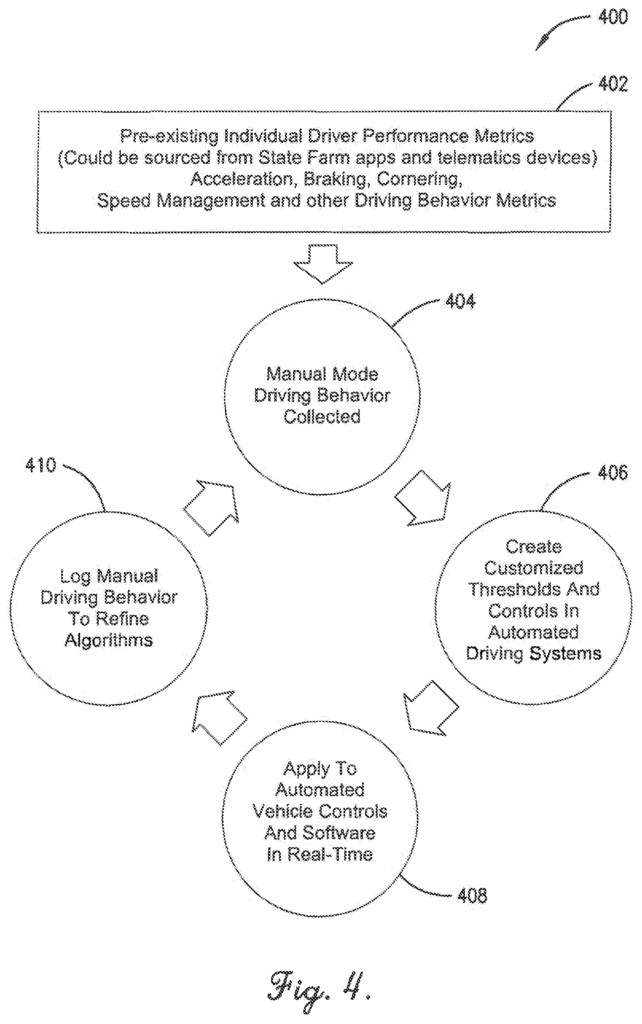
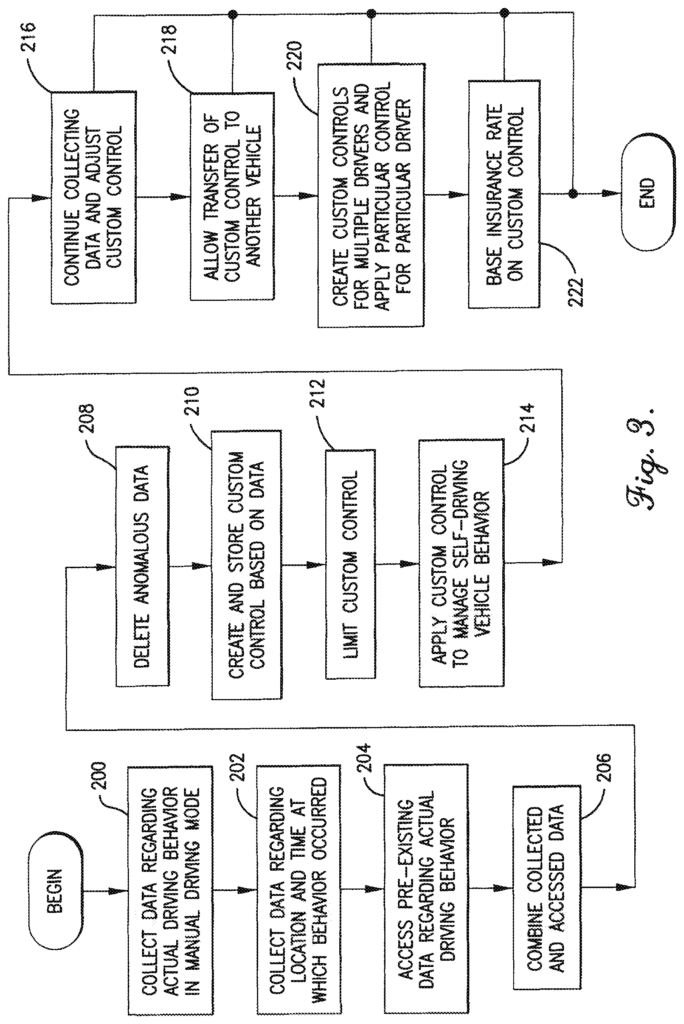
The system and method is for measuring the actual driving behavior of a driver (e.g. acceleration, deceleration), in manual mode, to determine the preferred driving style. It then causes an autonomous or semiautonomous vehicle, operating in self-driving, to drive itself within certain limits in accordance with that driver’s driving style. This provides a more comfortable and familiar driving experience for the user. The data collected is then combined with any existing data on actual driving behaviors. The combined data is used to create a custom control, which is applied in order to manage the self driving behavior of an autonomous or semi-autonomous car when it is in self-driving mode. The custom control is then adjusted to reflect the additional data collected.

Background for Managing self-driving behaviour of autonomous or semiautonomous vehicles based on actual driving behaviors of the driver
Autonomous cars may be more common in the future.” Autonomous vehicles are typically programmed in such a way that they operate or drive under real-world conditions, in a manner that is significantly different from that of a human driver. The driving style of an automated vehicle can be uncomfortable or upsetting to many drivers who are used to driving by themselves. This could, in turn lower an average driver?s confidence or interest to ride as a passenger in a self-driving vehicle.
The present embodiments can relate to, for example, a system or method that measures a driver’s driving behavior in manual mode in order to determine his/her preferred driving style. This is then used to cause a vehicle to drive itself in self-driving modes in accordance to a driving style substantially similar to the driver.
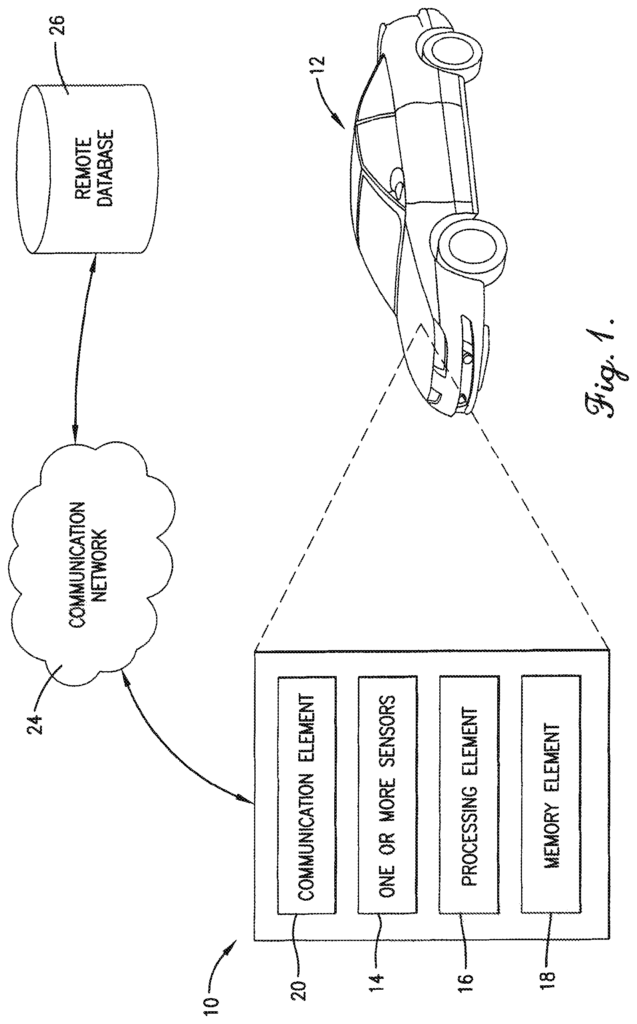
In one aspect, it is possible to provide a system for managing the autonomous driving behavior of the vehicle. The system can include a communication component configured to receive and send signals via a wireless network, a storage element configured for information, and a processor element configured to perform certain steps or actions. Data can be collected about the driving behavior of a driver in manual mode. Pre-existing data on the driving behavior may also be accessed. The collected data may then be combined. The combined data from the collected and accessed previously can be used to create a custom control that is applied to the self driving behavior of the vehicle. The custom control can be adjusted to reflect the additional data collected about the actual driving behaviour of the driver when in manual mode. The system, and the actions or steps it performs, may include alternative, additional or fewer components, steps or actions.
In another aspect, it may be possible to provide a computer-implemented technique for managing the autonomous driving behavior of the vehicle. The computer-implemented methods may include the following actions or steps. Data can be collected about the driving behavior of a driver in manual mode. Pre-existing information on the driving behavior may also be accessed. The collected data, as well as the pre-existing information, may then be combined. The combined data can be used to create a custom control that is applied to the self driving behavior of the vehicle. The custom control can be adjusted to reflect the additional data collected about the actual driving behaviour of the driver when in manual mode. The computer-implemented methods may include more, less, or alternative actions or steps, such as those described elsewhere in this document.
In another aspect, it may be possible to provide a nontransitory computer-readable media with an executable software stored on it for managing the autonomous driving behavior of the vehicle. The program can instruct the processing element to perform certain steps or actions. Data can be collected about the driving behavior of a driver when in manual mode. Pre-existing information on the driving behavior may also be accessed. The collected data, as well as the pre-existing information, may then be combined. The combined data can be used to create a custom control that is applied to the self driving behavior of the vehicle. The custom control can be adjusted to reflect the additional data collected about the actual driving behaviour of the driver when in manual mode. The program on the nontransitory computer-readable media may include alternative, additional or fewer instructions. These alternatives and other instructions are discussed elsewhere in this document.
Each aspect may include one or more additional or alternative features. Actual driving behaviors may include acceleration, deceleration and lane changes, as well as speed of cornering and speed management. The actual driving behavior can be measured using one or multiple sensors. The data collected may include the location and time of when the actual driving behavior was measured. The combined data can be cleaned up of any anomalous data. The custom control can be a threshold of performance for the self-driving behaviour. The custom control can be created and applied in a way that does not allow it to exceed a certain limit. Limits may be set based on information such as driving conditions, driving laws and circumstances, parental preferences, vehicle owner preferences, or employer preferences. The steps or actions can also include gathering driving behavior data from a plurality drivers driving in a certain area at a specific time.
Applying a custom control can include identifying changes in actual driving behaviors of the drivers in manual driving mode, associated with a specific location or time and adjusting the control to reflect these changes in actual driving behaviors of the drivers when the self driving vehicle is operating in self driving mode at that particular location or time. The steps or actions can also include allowing the user to transfer the control from one self-driving car to another. The steps or actions can also include creating a plurality custom controls for different drivers using the self driving vehicle. Each custom control is associated with a different driver. Identifying a specific driver among the plurality, then applying a custom control that corresponds to the particular driver. The custom control can be adjusted periodically or continuously. These steps or actions could also include adjusting the insurance rate for the self-driving car based on the custom control. The steps or actions could also include allowing a driver to manually change the custom control. Insurance rates would then be based on this manually changed custom control as well as the amount of time the vehicle spent in self-driving.
The following description and illustration of preferred embodiments will make the advantages of these inventions more obvious to those who are skilled in the field. The present embodiments are capable of being adapted to other, different embodiments and their details can be modified in many ways. The drawings and descriptions are intended to be indicative and not restrictive.
The present embodiments relate, inter alia to creating and using a objective measure of driving behaviour as input to an automated (or semi-autonomous vehicle) driving system in order to match an individual’s driving style and behavior to the autonomous vehicle?s automated control system. The system and method can use a driver-feedback scoring algorithm to provide an overall score, as well as separate scores for cornering, acceleration, braking and/or driving behavior metrics, at the trip level, in order to objectively quantify driving patterns, styles and/or behaviors, of individual drivers, within defined driving environments or situations. The driving scores can be used as inputs to automated vehicle control system to correlate automated vehicle controls for acceleration, braking cornering and/or any other driving behavior in order to achieve safe levels as well as closely mimic driver behavior. This approach could offer drivers a similar experience behind the wheel with automated driving systems, so that they feel more confident and comfortable in semi-autonomous or autonomous vehicles.
The present embodiments could enable vehicle manufacturers to use new objective standards of safe driving behavior in order to tune and code automated systems for partially or fully autonomous cars. The present embodiments could also allow auto manufacturers to determine a safe driving range for automated systems based on driving behavior metrics from auto insurance providers (or others) and/or data about driving behavior and telematics.

In one aspect, data on driving behavior and/or telematics may be collected with the consent of an insured driver. The data collected by telematics or driving behavior may be related to an insured’s typical acceleration and braking, cornering and speed, as well as other aspects of driving style. A range of driving behaviors can be used as an object measure. The range of driving behaviour can be entered into a semi-autonomous or autonomous vehicle control system. The autonomous or semiautonomous vehicle can then mimic the driving behavior of an insured person to improve the customer experience for autonomous and semiautonomous vehicles owners/users.
It is possible to determine a safe operating range. It is possible to determine a safe driving range for a number of driving behaviors or characteristics (acceleration, braking, cornering speed, following distance etc.). “For example, the normal driving range can be determined by using different factors (e.g. g-force measurements of acceleration, braking or turning).
If the insured’s driving behavior is typical for a certain driving characteristic, and falls within the normal range determined, then the automated vehicle’s driving mode may include a set-up or adjustment to the insured?s driving behavior. If, on the other hand the insured’s driving behavior is not within a safe range, the driving mode may be set to an upper limit or threshold.
For instance, if an insured person is known to exhibit normal acceleration and brake, the driving mode of the autonomous vehicle may be set up to mimic that insured driver’s driving in terms of vehicle acceleration and brake. If the insured drives outside of the safe range or over the speed limits, the automated driving mode can include a setting that automatically adjusts the vehicle to drive within the speed limits and/or a safe speed. Some or all driving characteristics could include acceptable speeds or g forces. “If the driver exceeds these speed or g force thresholds on a regular basis, automated vehicle operations may be limited by the acceptable speeds or the g forces for vehicle safety.
In one embodiment, the smart vehicle controller could have a display that would allow a passenger to choose a driving mode in an autonomous or semiautonomous vehicle. A display screen could, for example, present the passenger with several driving modes, including (1) Conservative Driver (2) Normal Driver (3) Aggressive driver and/or (4) my Driving Profile. The My Driving Profile can direct an autonomous vehicle (by a smart car controller or other processors), to drive in a manner that mimics typical passenger driving behavior. The semi-autonomous or autonomous vehicle can be driven automatically by a processor in a way that matches the selected mode, such as conservative or normal driving, or according to a driver profile.
An insurer may collect data on the insured’s mobile phone, telematics unit, or automated vehicle controller in relation to the amount of time the insured spends in the autonomous vehicle, for each mode of driving. Usage-based auto insurance can be updated based on the number of miles driven for each driving mode. Auto insurance policies, rates, discounts, and premiums may be determined by the time or distance that an insured driver has driven the semi-autonomous or autonomous vehicle in each mode (conservative or aggressive driving, normal or My Driving Profile). “For example, if an insured typically drives their autonomous vehicle in a conservative or normal mode, they may receive a discount for auto insurance.
Exemplary Embodiments
Referring to FIGS. The present embodiments relate to a system and method that objectively measures a driver’s driving behavior in manual mode to determine the preferred driving style. It then causes a self driving vehicle to operate itself within limits in accordance with the substantially similar driving style in self driving mode.
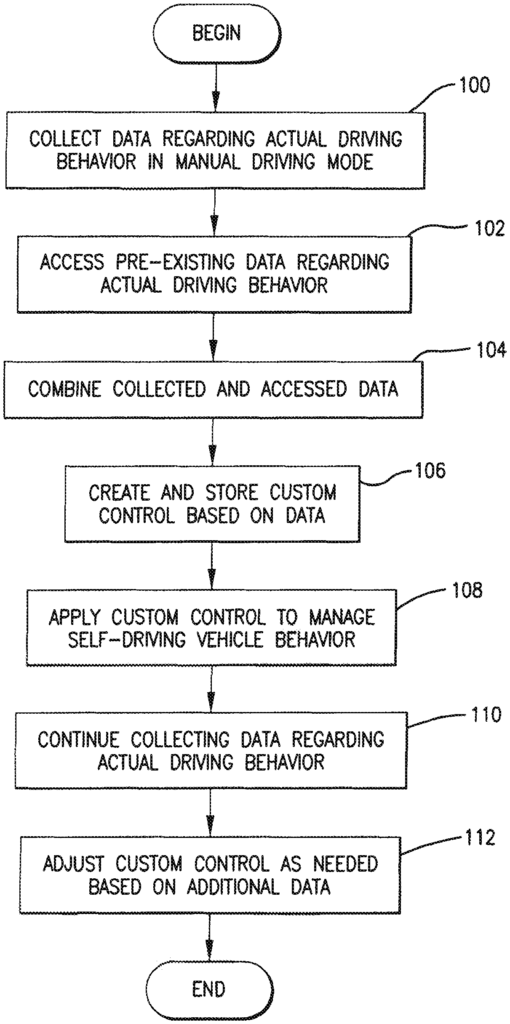
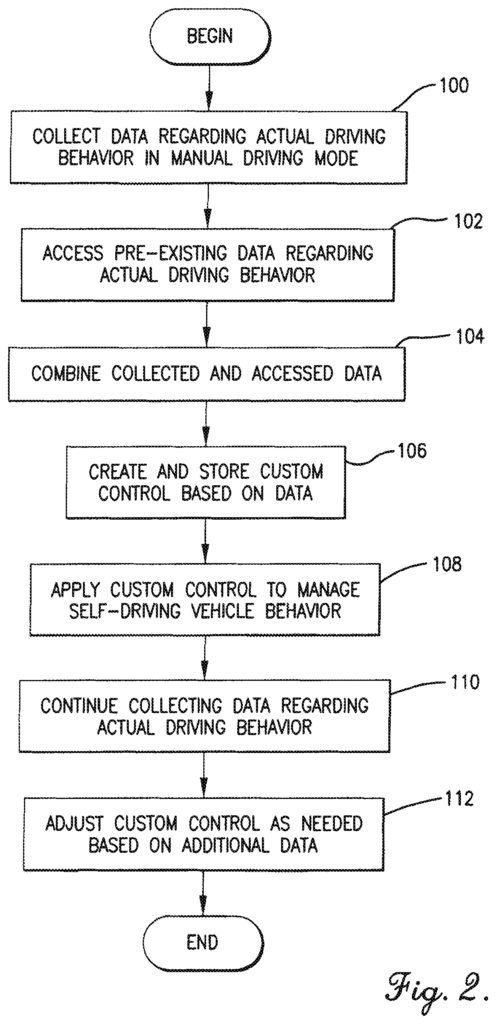
As shown in step 100, “the system 10 can collect data about the actual driving behavior of the driver when driving in manual mode.” In one implementation one or multiple sensors 14 measure one of more indicators of the actual driving behavior and then communicate these measurements to either a processing element 16, or a memory 18. The data can include time and/or location data about a plurality locations or times when the actual driving behaviors were measured.
As shown in Step 102, “The system 10 can access any existing data about the driving behavior of the driver when in manual mode.” These pre-existing information may be stored in the memory element 18 of the system 10 or remotely accessed through a communication device 20. They may have originally been collected for the same purpose or a completely different one. As shown in step 104, the system 10 can combine collected data and pre-existing information about the driving behavior of the driver when driving in manual mode. Combining these data can provide a more accurate and larger sample of a driver’s driving behavior.

The system 10 can create custom controls or performance thresholds based on the data about the actual driving behavior of the driver, as shown at step 106. Performance thresholds or custom controls can be used to control the behavior of the autonomous vehicle 12. In one implementation of the system, anomalous data can be removed from the data. In one implementation, the systems 10 can impose limits to the performance thresholds and other custom controls, so that they do not exceed the legal or safe minimums and maximums. This is regardless of whether the driver has exceeded these limits while driving manually (i.e. the system 10 will delete or ignore data which exceeds the limits). These limits can be dynamically adjusted in response to driving circumstances (e.g. road construction, accidents or different jurisdictional limitations, severe weather and/or any other unusual driving conditions), driving conditions (e.g. near schools), local law (e.g. different limits imposed by various jurisdictions) and/or sources of limits (e.g. parents imposing different self driving behavior limits for their children, employers imposing limits on self driving behavior when their employees use the vehicle, and/or car owners imposing limits when they let In a similar way, objective measurements can be taken of manual driving behavior of an individual driving in a particular area at a particular time. These measurements are then analyzed and used to determine safe operating ranges of some or all autonomous vehicles.