Invented by Michael Steven Montemerlo, Hyman Jack Murveit, Christopher Paul Urmson, Dmitri A. Dolgov, Philip Nemec, Google LLC, Waymo LLC
![]()
The Google LLC, Waymo LLC invention works as follows
Aspects in the disclosure concern determining whether an autonomous car should be driven in semi-autonomous or autonomous mode (where the vehicle’s computer controls steering, acceleration and braking). A computer could control a vehicle in either an autonomous or semi-autonomous mode, for example. One or more sensors may be continuously transmitted data to the computer. These data can be used to identify and determine the object’s characteristics. These objects may be compared with detailed map information and a traffic pattern model to determine their characteristics. The computer can generate an alert to notify the driver if the objects’ characteristics differ from the traffic pattern model and detailed map information. Or, it may move the vehicle to avoid problems.

Background for Determining when it is safe to drive autonomously
Autonomous cars use a variety of computing systems to assist in driving drivers from one place to the next. Some autonomous vehicles require input from an operator such as a pilot, driver or other type of driver. Others systems, such as autopilot systems may only be used when the system is engaged. This allows the operator to change from a manual mode where the operator has a lot of control over vehicle movement, to an autonomous mode, where the vehicle drives itself, to modes that are somewhere in between.
These autonomous vehicles can maneuver themselves between places using highly detailed maps and sensors to detect the vehicle’s surroundings. It may prove difficult for the vehicle without driver input if the maps are inaccurate.
In certain driving situations, drivers may feel less safe when they rely on the vehicle to move themselves. A driver might feel less secure in dense traffic areas or close to a moving vehicle. Drivers may feel the need for constant monitoring of the vehicle’s location to ensure that the driver can take control from the autonomous computing system. This could reduce the safety of autonomous vehicles and decrease driver confidence.
One aspect of this disclosure describes a method. The method involves receiving data from one of several sensors that are associated with a vehicle, and then detecting an object and a characteristic based on those received data. A processor determines a deviation for the object based upon a comparison between the characteristic and the traffic pattern information, which includes an expected range for objects in the road. Finally, the deviation value is compared to a threshold deviation for an expected range for the characteristic. If the deviation value exceeds the threshold deviation, a notification is sent to the driver.
In one case, the method includes the driver providing input. This indicates that the driver has assumed control of the vehicle. Another example is the characteristic that includes the location of the object. The deviation value can be calculated by subtracting the position of the object from the expected range of positions defined in traffic pattern model information. Another example is speed. The deviation value can be calculated by subtracting the speed of the object from the expected range of speed values in the traffic pattern information. Another example is a characteristic that includes a trajectory for the object. The deviation value can be calculated by subtracting the trajectory from the expected range of values defined in traffic pattern model information. Another example is to detect a second object and a second characteristic of the detected object using the received data. The second deviation is determined by comparing the second characteristic of the detected object with the traffic pattern information. Next, compare the second deviation to the threshold deviation to determine an expected range of values for this second characteristic. Finally, notify the driver of the vehicle if the deviation value falls within the threshold deviation and the second deviation is below the second threshold deviation. Another example is to detect a second object and its second characteristic based upon the received data. The method then determines a second deviation for the second object based a comparison between the second characteristic and the traffic pattern information. Before providing notification, it determines whether the second deviation values are within the second threshold value by comparing the second deviation to the first threshold deviation value. Another example is to determine a second deviation for the object using detailed map information that describes expected features of roads and the characteristics of expected features. The second deviation value will be compared to a second threshold deviation for the expected characteristics of expected features. Finally, notification to the driver will be given if the second deviation exceeds the second threshold deviation.
Another aspect provides a method. The method involves receiving data from one of several sensors that are associated with a vehicle, detecting an object, and determining a characteristic for it based upon the received data. A processor then determines a deviation for the object using a comparison between the characteristic and detailed map information that describes expected features of road and characteristics of expected features. Notifying the driver if the deviation is higher than the threshold deviation value.
In one case, the method includes the driver providing input to indicate that the driver has taken over control of the vehicle. Another example is that the characteristic includes the location of the object detected. The deviation value can be calculated by subtracting the position from the expected characteristic of position as defined in the detailed maps information. Another example is the characteristic that includes the shape of a detected object. The deviation value can be calculated by subtracting the detected object’s shape from the expected characteristic for its shape as defined in the detailed maps information. Another example is the size of the object. The deviation value can be calculated by subtracting the size from the expected characteristic of size as defined in the detailed maps information. Another example is to detect a second object and a secondary characteristic of the second object using the received data. The second deviation is determined by comparing the second characteristic with the map information. This is done to determine if the second deviation is within the threshold deviation and outside the second threshold deviation. A notification is sent to the driver. Another example is to detect a second object and a secondary characteristic of the second object using the received data. The second deviation value will be determined based upon a comparison between the second characteristic and detailed map information. Finally, the notification will be sent if the second deviation value falls within the second threshold deviation.
A further aspect of this disclosure describes a method. The method involves receiving data from one of several sensors that are associated with a vehicle, detecting an object and a characteristic; determining a deviation for the object by a processor based upon a comparison between the characteristic and traffic patterns model information, which includes an expected range for objects in the road; comparing deviation to a threshold deviation for the expected range for the characteristic; and maneuvering the vehicle defensively if deviation is greater than the threshold deviation value.
Manipulating the vehicle defensively means changing lanes or slowing down the vehicle. Another example is the characteristic that includes the location of the object. The deviation value can be calculated by subtracting the position of the object from the expected range of positions defined in traffic pattern model information. Another example is speed. The deviation value can be calculated by subtracting the speed of the object from the expected range of speed values in the traffic pattern information. Another example is that the characteristic includes the trajectory of a detected object. The deviation value can be calculated by subtracting the trajectory from the expected range of values defined in traffic pattern model information. Another example is to detect a second object and a second characteristic of the object using the received data. The second deviation value can be determined by comparing the second characteristic with the traffic pattern information. Next, compare the second deviation to a second threshold value for the expected range for the characteristic of this object. Finally, maneuver the vehicle defensively if the deviation value falls within the threshold deviation limit and the second deviation is not outside the second threshold deviation. Another example is to detect a second object and its second characteristic based upon the received data. The second deviation value will be determined based upon a comparison between the second characteristic of the traffic pattern model information and the second deviation. Before maneuvering the vehicle defensively, the second deviation should be within the second threshold value. This can be done by comparing the second deviation amount to the second threshold value. Another example is to determine a second deviation for the object using detailed map information and the characteristic of the object. Then compare the second deviation to the second threshold deviation for expected characteristics of expected features.
An additional aspect of the disclosure describes a method. The method involves receiving data from one of several sensors that are associated with a vehicle, detecting an object, and determining a characteristic for it based upon the received data. A processor then determines a deviation for the object based off a comparison between the characteristic of the detected object and detailed information about the road and the characteristics of expected features. The second deviation value is then compared to a second threshold deviation for the expected characteristics and the expected features. Finally, the processor identifies the mismatched area if the second

In one case, the characteristic comprises a position of a detected object. The deviation value is calculated by subtracting the position from the expected characteristic for the location defined in the detailed maps information. Another example is the shape of the object. The deviation value can be calculated by subtracting the expected characteristic of shape from the measured shape. Another example is that the characteristic includes the size of a detected object. The deviation value can be calculated by subtracting the size of the object from the expected characteristic of size as defined in the detailed maps information. Another example is to detect a second object and its characteristic based upon the received data. The second deviation value is determined by comparing the second characteristic with the detailed map information. When the deviation value falls within the threshold deviation limit, it is used to identify a mismatched area. Finally, the vehicle is maneuvered without input from the driver to avoid this mismatched area. Another example is to detect a second object and a secondary characteristic of the object detected using the received data. The second deviation value for this object is determined based upon a comparison between the second characteristic and detailed map information. Finally, before identifying the mismatched area the driver must determine if the second deviation value falls within the second threshold deviation.
Another aspect of the disclosure still provides a device. The memory stores information about traffic patterns, including an expected range for values that correspond to a characteristic of objects on the road. A processor is also included in the device. The processor can receive data from one of several sensors that are associated with a vehicle. It will detect an object and determine its characteristic based upon the received data.
In one case, the processor can slow down the vehicle if the driver doesn’t take control after receiving the notification. Another example is that the processor can also be programmed to move the vehicle into another lane if it is not controlled by the driver after notification has been sent.
Another aspect provides for a device. The device contains memory that stores detailed map information, including descriptions of expected features and characteristics of those features. A processor is also included in the device. The processor can receive data from one of several sensors that are associated with a vehicle. It will detect an object and determine its characteristic based upon the received data.
In one case, the processor can also be configured to slow down the vehicle if the driver fails to take control following notification. Another example is that the processor can identify an area mismatched if it is greater than the threshold deviation value and maneuver the vehicle to avoid it if the driver doesn’t take control.
Another aspect of the disclosure provides tangible computer-readable storage media on which computer-readable instructions of a programme are stored. When executed by a processor the instructions cause the processor perform a method. The method involves receiving data from one of several sensors that are associated with a vehicle. It also includes detecting an object and determining its characteristic based upon the received data.
Another aspect of the disclosure provides tangible computer-readable storage media on which computer-readable instructions of a programme are stored. When executed by a processor the instructions cause the processor perform a method. The method involves receiving data from one of several sensors that are associated with a vehicle, detecting an object and determining its characteristic based upon the received data. It also includes comparing the characteristic of the detected object to detailed map information that describes expected features of roads and other characteristics. Finally, identifying the mismatched areas if the second deviation is greater than the second threshold deviation.
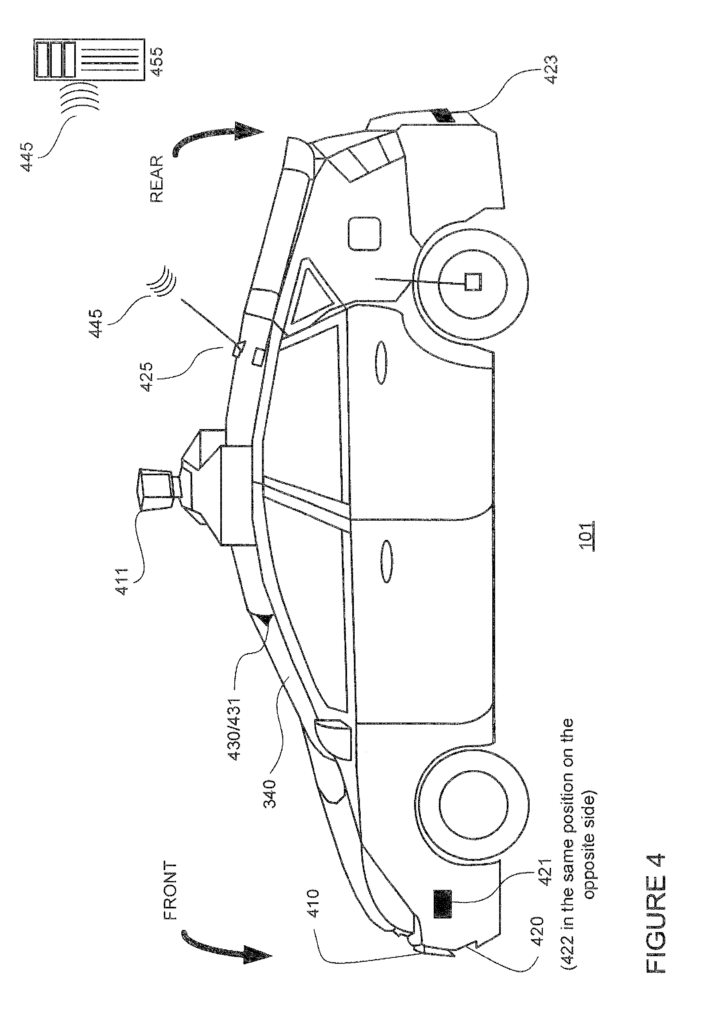
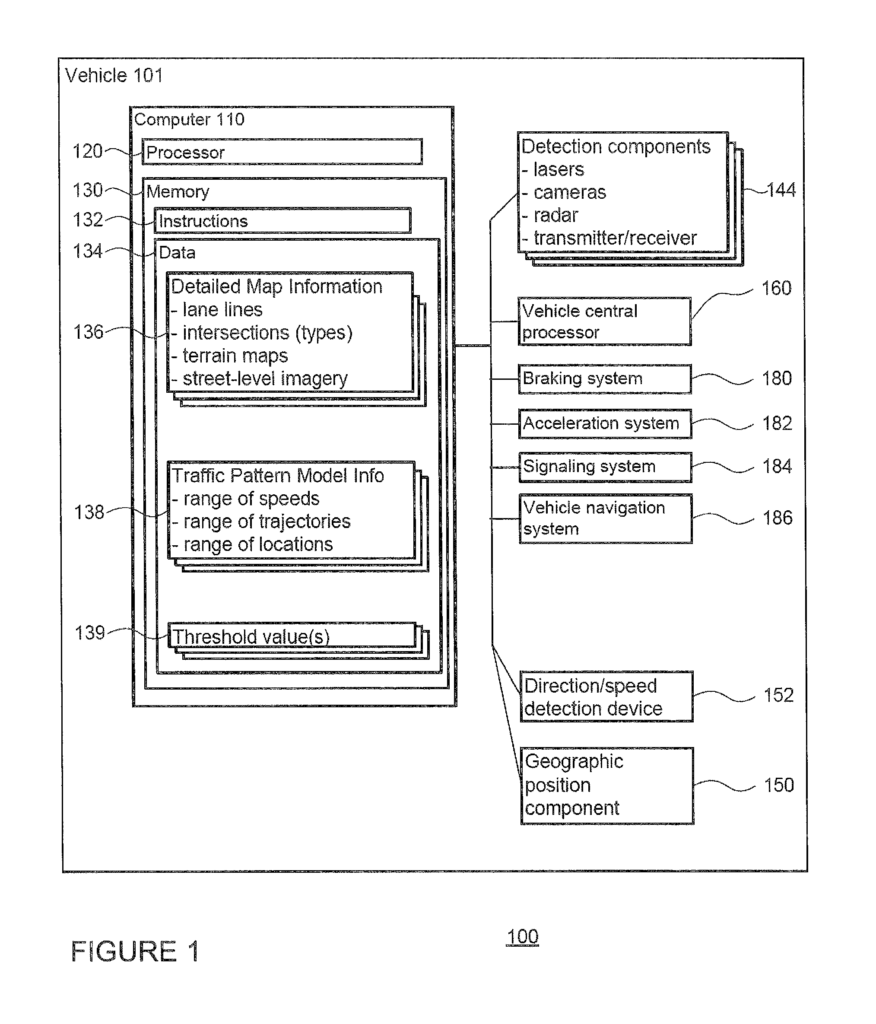
As shown at FIG. “An autonomous vehicle system 100 according to one aspect of the disclosure comprises a vehicle 101 with different components. Although certain aspects of this disclosure are useful for specific types of vehicles only, others of the disclosure can be used to describe any kind of vehicle, including cars, trucks and motorcycles, buses, boats, planes, helicopters or lawnmowers. One or more computers may be installed on the vehicle, including a computer 110 with a processor 120 and memory 130, as well as other components that are common in general-purpose computers.
The processor 120 could be any standard processor, including commercially available CPUs. The processor could also be a dedicated device, such as an ASIC and other hardware-based processors. FIG. FIG. Memory could be, for example, a hard drive or another storage media that is located in a different housing than computer 110. Referring to a processor or computer means that a number of processors, computers or memories may operate simultaneously. Some components may have their own processors that perform calculations specific to their function, rather than using one processor to complete the steps described.
In different aspects, the processor 120 can be remotely located from the vehicle 101 and communicate wirelessly with the vehicle 101.” Some of the described processes are performed on a processor located within the vehicle 101, while others can be executed by remote processors. This includes the execution of a single maneuver.

The memory 130 contains information that is accessible by the CPU 120. This includes instructions 132 and data 134. These can be executed by the processor 120. The memory 130 can be any type of storage that is capable of accessing information by the processor. It may include a computer-readable medium or another medium that stores data that can be read using an electronic device such as a hard drive, memory card, ROM RAM or DVD, as well other write-capable or read-only memories. Different combinations of the above may be used to create systems and methods that store different parts of the instructions or data on different media.