Invented by Travis Schuh, Auris Health Inc
The market for instrument-mounted tension sensing devices is expected to grow at a significant rate in the coming years. This growth can be attributed to the increasing adoption of robotically-driven medical tools in surgical procedures, as well as the need for accurate and precise measurements during these procedures.
One of the key drivers of this market is the increasing demand for minimally invasive surgeries. Robotically-driven medical tools are often used in these procedures as they allow for smaller incisions, less pain, and faster recovery times. Instrument-mounted tension sensing devices are essential in these surgeries as they provide real-time feedback to the surgeon, allowing them to adjust the force applied by the tool and prevent damage to surrounding tissue.
Another factor driving the market for instrument-mounted tension sensing devices is the increasing focus on patient safety. These devices provide accurate and precise measurements, reducing the risk of complications during surgical procedures. They also allow for more consistent and reproducible results, improving patient outcomes.
The market for instrument-mounted tension sensing devices is highly competitive, with several players offering a range of products. These devices can be integrated into existing surgical tools or can be standalone devices. They are available in different sizes and configurations, depending on the specific application.
One of the challenges facing this market is the high cost of these devices. However, the benefits they offer in terms of patient safety and surgical precision make them a worthwhile investment for hospitals and surgical centers.
In conclusion, the market for instrument-mounted tension sensing devices for robotically-driven medical tools is expected to grow in the coming years. The increasing adoption of robotically-driven medical tools in surgical procedures, the focus on patient safety, and the need for accurate and precise measurements during surgeries are all driving factors. While there are challenges to overcome, the benefits of these devices make them a valuable addition to any surgical toolkit.
The Auris Health Inc invention works as follows
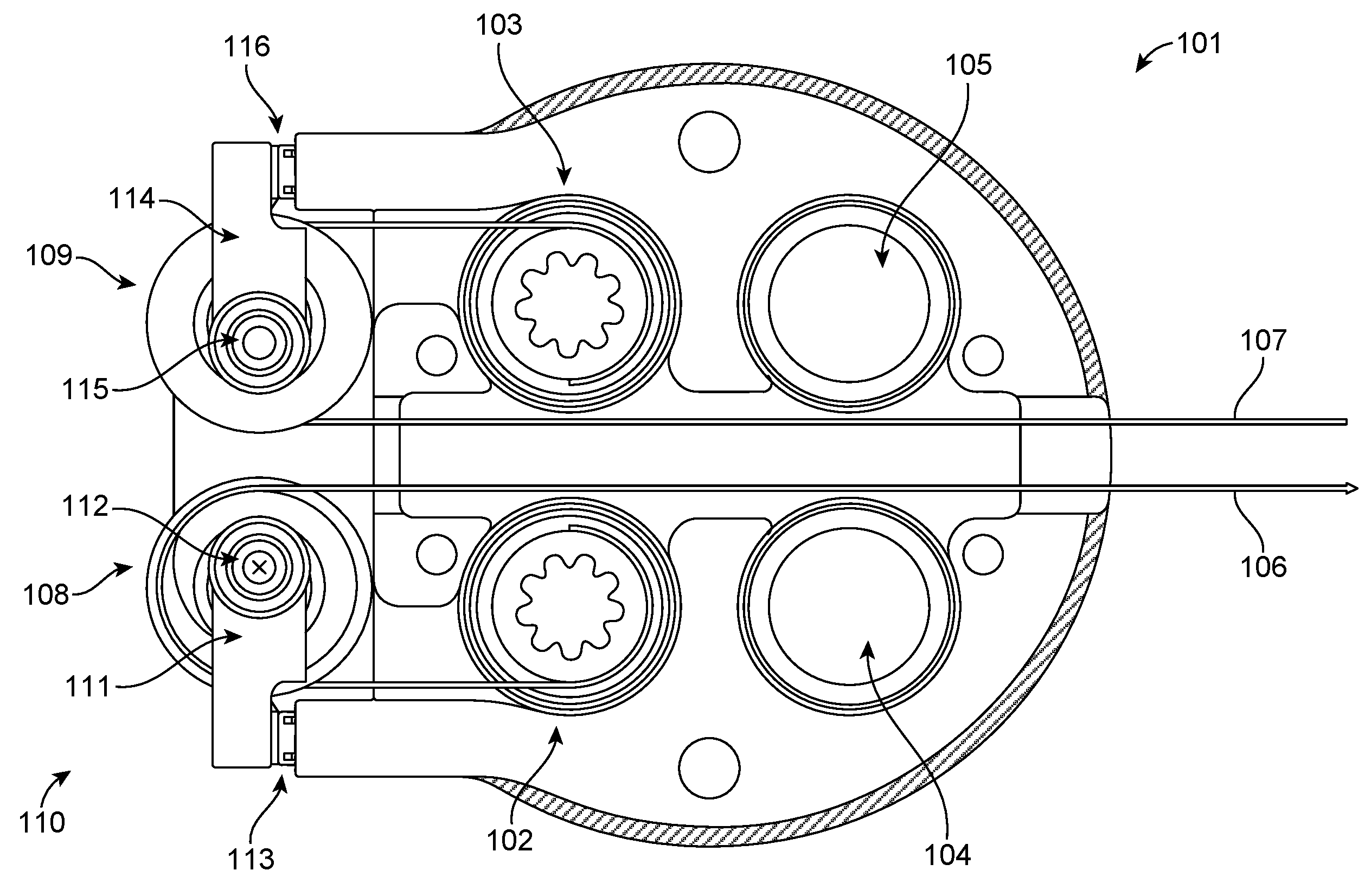
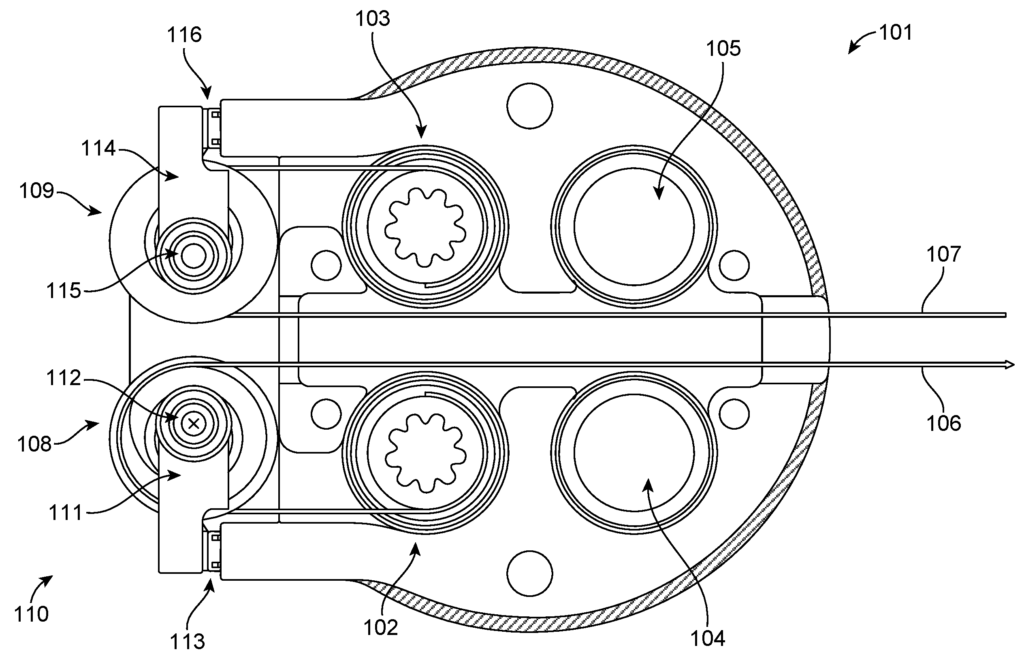
A tension mechanism for a robotically-controlled medical device measures the tension applied to an actuation tendon to provide feedback to a robotic controller. The device may include an elongated tool, an elongated component, and a base. The distal end is connected to the elongated device by the elongated members. It can be used to activate the distal end with tension in the member. The base is located at proximal ends of the elongated instruments and contains a first redirect face that redirects the member. The first redirect surface is connected to a lever element, which is designed to apply a reactive force to the sensor when there is tension in the elongated members.
Background for Instrument-mounted tension sensing device for robotically-driven medical tools
1. “1.
The description generally refers to surgical robotics and in particular to an instrument-mounted tension sensing device that can be used in conjunction a medical robots platform for various surgical procedures.” More particularly, the field of the invention pertains to instrument-mounted tension sensing mechanisms that detect tension in actuation tendons, such as those used to operate robotically-controlled tools to perform diagnostic and therapeutic surgical procedures.
2. “2.
Robotic technology offers many advantages over manual, traditional surgery. Robotic surgeries offer greater precision, control and accessibility. Robotically-controlled technologies, however, sometimes create engineering challenges that require creative engineering workarounds. In the case of robotically-controlled tools, the use of actuation tendons to operate robotic laparoscopic tools and catheters gives rise to control problems that often requires very precise monitoring of the actuation tendons. The tendon can stretch and deform over the life of the actuation tendon and may show greater non-linearity in relation to instrument tip displacement relative the tension applied. Accordingly, within a robotically-controlled instrument, there is a need to measure the tension applied to the actuation tendon to provide feedback to the control robotic controller. A tension sensing instrument is therefore required.
The present invention describes a medical device that includes an elongated tool, an elongated component that attaches to the distal tip of the instrument, and a base that is located at the proximal edge of the instrument. This base comprises a redirect surface that redirects elongated members. A lever element is attached to the first redirect surface, which is designed to apply a reactive force to a sensor when there is tension in the member.
In one aspect, a first redirect surface has low friction. One aspect of the first redirect surface includes a first rotatable base. One aspect of the base also includes a second rotating body. The elongated member is then threaded around this second rotatable. One aspect of this design is that the second rotatable bodies rotate in a way that causes tension in the elongated members. One aspect of the second rotatable bodies is made up of splines, which receive rotational motion via a sterile interface provided by the robotic drive mechanism. The male connector is the second rotatable body. One aspect states that the second rotatable piece is a female connector.
Another aspect is that the lever elements are constrained by a pivot on a first position of the lever elements and a sensor at a second place of the lever elements. One aspect states that the pivot point for the lever element is offset from its axis on the first rotatable piece.
Another aspect fixes the ratio between the tension in the extended member and the reactive force on sensor. One aspect of the lever element is designed to distribute tension in the extended member between the sensor and pivot point. The elongated instrument can be flexible in one aspect. The elongated instrument can be used as a catheter. The rigidity of the elongated instrument can be seen in one aspect. One aspect of the base allows for an interface with a robot drive mechanism. One aspect of the elongated member includes at least one wire, cable, or tendon. One aspect of the sensor is a load cell.
BRIEF DESCRIPTION DES DRAWINGS
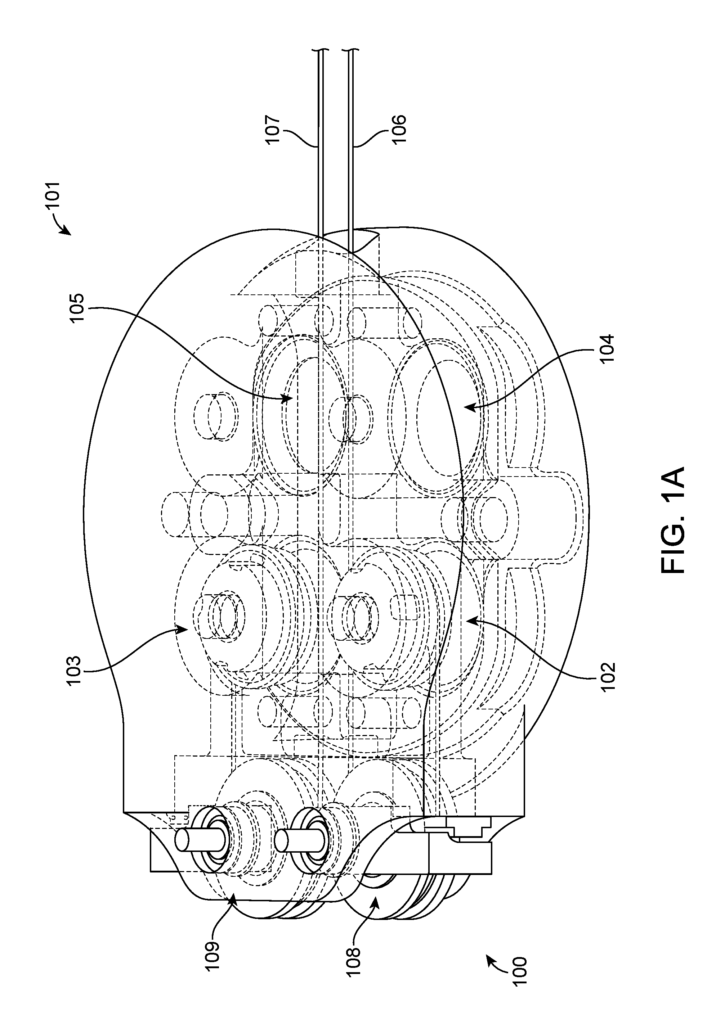
FIG. 1A illustrates a tension sensing mechanism located within a robotically-controlled instrument, in accordance with an embodiment of the present invention.
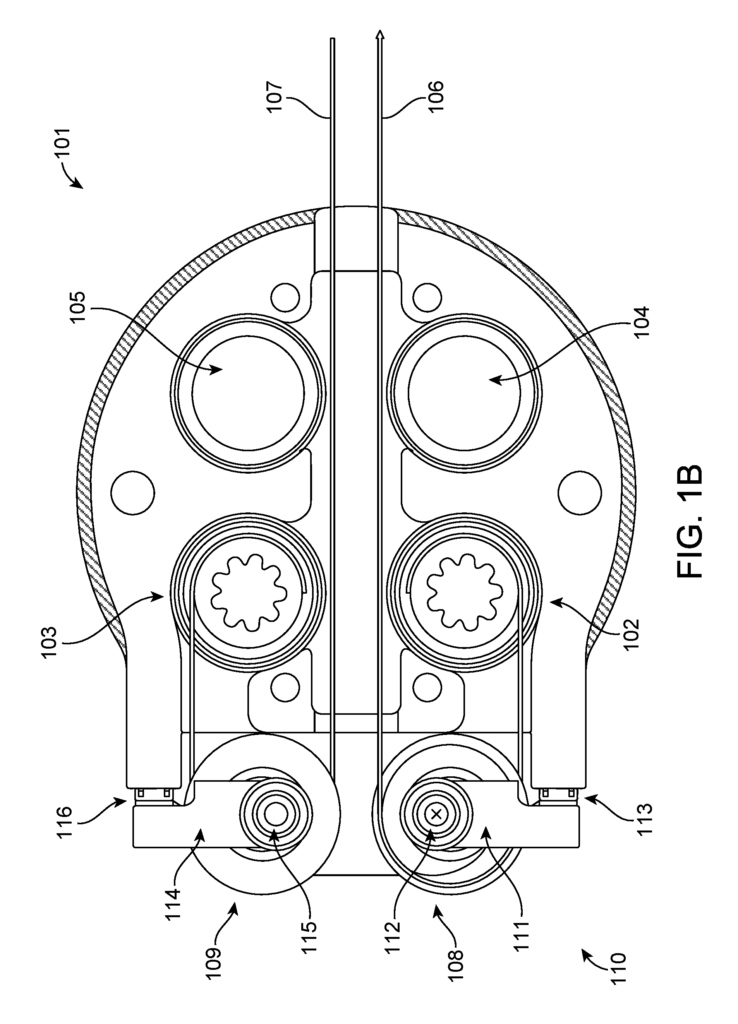
FIG. 1B illustrates a top schematic view of the robotically-controlled instrument of FIG. 1A is in accordance to an embodiment of this invention.
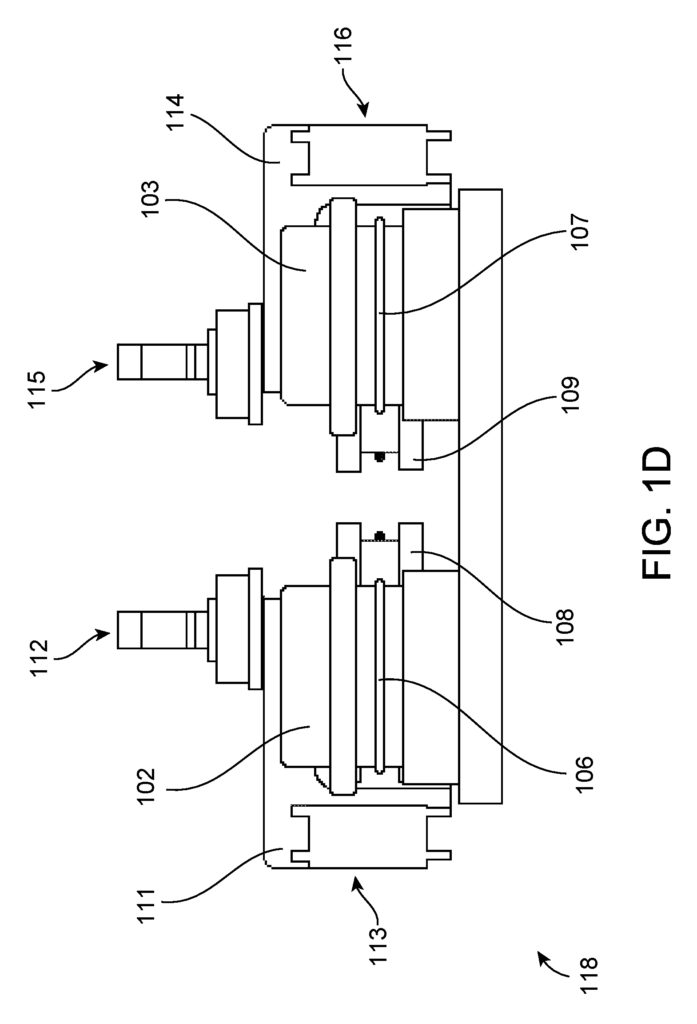
FIGS. 1C, 1D, 1E, 1F, 1G illustrate additional views of the robotically-controlled instrument from FIGS. 1A, 1B are in accordance to an embodiment of this invention.
FIG. “FIG.
FIG. 2B shows the idler carriage for the instrument in FIG. 2A, which incorporates a tension sensing device, according to an embodiment of this invention.
FIG. 2C shows the idler carriage for the instrument in FIG. 2A, which incorporates a tension sensing device, according to an embodiment of this invention.
FIG. FIG. 2D shows a vertical cross-sectional image of the idler carriage in FIG. 2A, which incorporates a tension sensing device, according to an embodiment of this invention.
FIG. “FIG. 2A, which incorporates a tension sensing device, according to an embodiment of this invention.
FIG. “FIG.
FIG. “FIG.
FIG. “FIG.
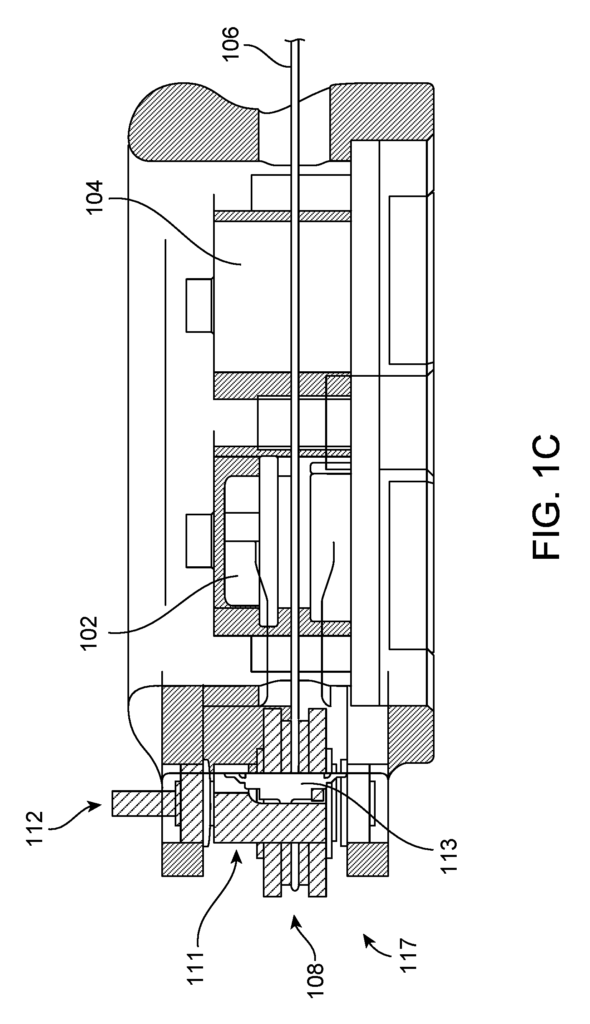
We will now refer in detail to various embodiments. Examples of these are shown in the accompanying figures. The figures may contain similar or similar reference numbers where possible. This may indicate similar functionality. Figures depict the embodiments of the described system or method for illustration purposes only. The following description will help the skilled artist to recognize that other embodiments of the structures or methods described herein can be used without departing from these principles.
Click here to view the patent on Google Patents.
Leave a Reply