Invented by Matthias Wisniowski, Stuart Glaser, Gautier Minster, GM Global Technology Operations LLC
One of the key drivers of this market is the increasing demand for smart city solutions. As cities become more crowded and traffic becomes more congested, there is a growing need for innovative solutions that can help to manage traffic flow and reduce congestion. Systems and methods for traffic signal light detection are an important part of this trend, as they can help to improve the efficiency of traffic management and reduce delays for drivers.
Another important driver of this market is the increasing availability of advanced technology. With the development of new sensors, cameras, and other detection systems, it is now possible to detect the presence of vehicles at traffic signals with greater accuracy and reliability than ever before. This has led to the development of new systems and methods that are more effective and efficient than older technologies.
In addition to these drivers, there are also a number of challenges facing the market for systems and methods for traffic signal light detection. One of the biggest challenges is the cost of implementing these systems. While the technology itself is becoming more affordable, there are still significant costs associated with installing and maintaining these systems, particularly in older cities with existing infrastructure.
Another challenge is the need for interoperability between different systems and technologies. As cities around the world adopt different systems and methods for traffic signal light detection, there is a growing need for these systems to be able to communicate with each other and work together seamlessly. This requires a high degree of standardization and cooperation between different vendors and manufacturers.
Despite these challenges, the market for systems and methods for traffic signal light detection is expected to continue growing in the coming years. As cities around the world continue to grow and become more congested, there will be an increasing need for innovative solutions that can help to manage traffic flow and reduce delays for drivers. Systems and methods for traffic signal light detection will be an important part of this trend, and will continue to play a key role in the development of smart cities around the world.
The GM Global Technology Operations LLC invention works as follows
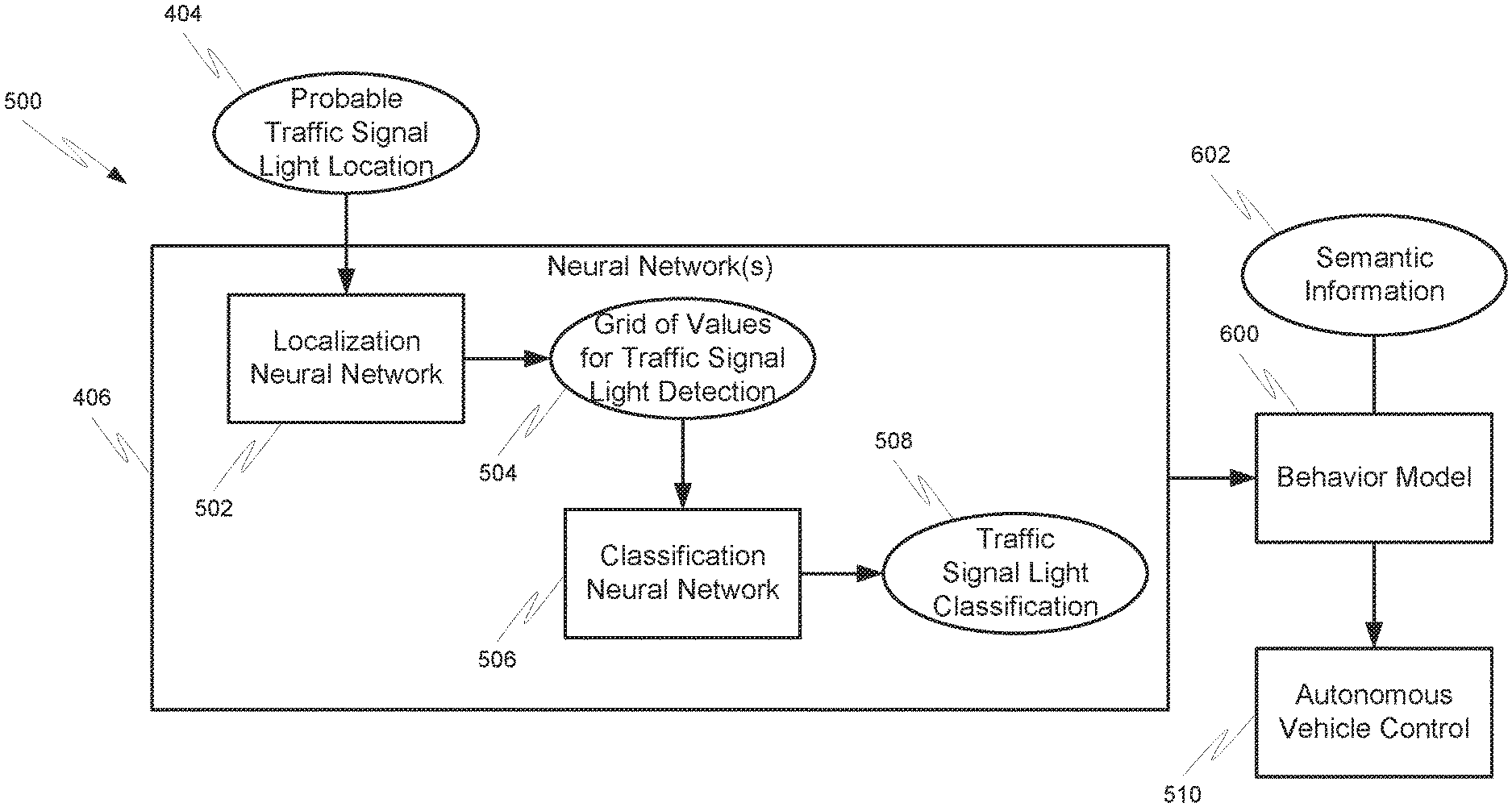
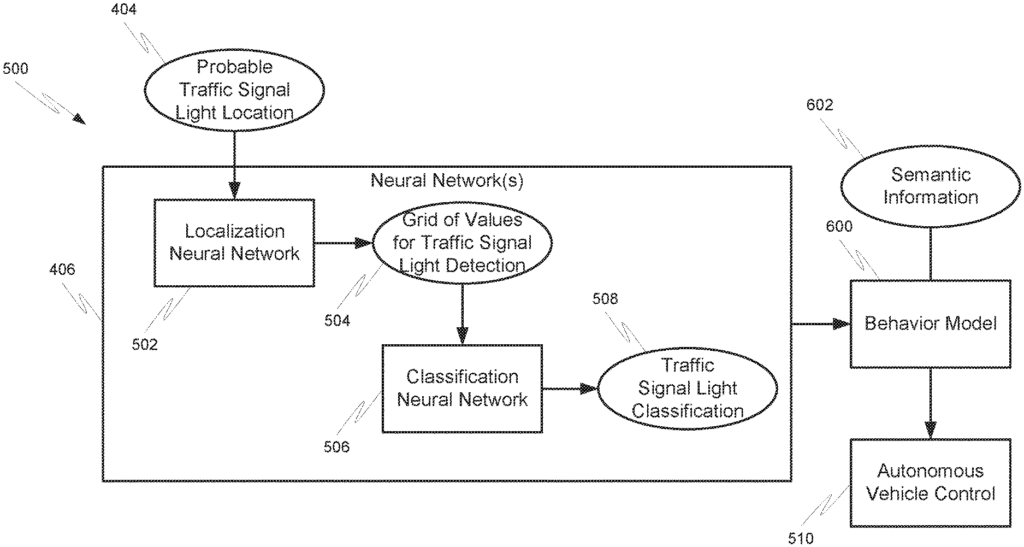
Systems and methods for analysing traffic signals lights are available to control an autonomous car. One method involves receiving an image from a camera about at least one traffic light and then receiving data related thereto. Neural networks determine the location and characteristics for the traffic signal lights.
Background for Systems and Methods for Traffic Signal Light Detection
Systems and methods for controlling an autonomous car are available. One embodiment of a system and method involves receiving an image from a camera concerning at least one traffic light and data related thereto. This information can be used by machine learning models to determine the location and characteristics for the traffic signal lights.
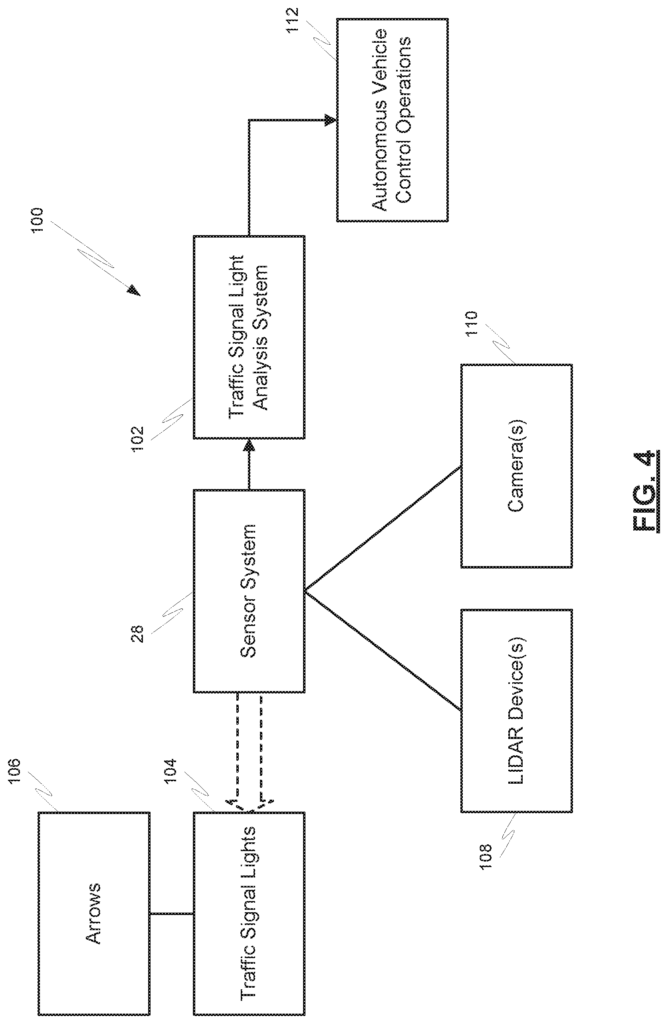
In some embodiments, a system or method involves analyzing traffic signals lights to control an autonomous car. One or more processors receive an image from a camera that shows at least one traffic light within the autonomous vehicle’s driving environment. The one or more processors receive data from a lidar device that is related to the probable geometry and location of the traffic light within the image. A machine learning model, which includes one or several neural networks, is applied to the received data as well as the camera image to determine the location and characteristics the traffic signal lights. To determine the type of indicator, the determined characteristics include the description of the traffic light in terms its shape and color. The one or more neural networks determine the location and characteristics of traffic signals light to control the autonomous vehicle.
DESCRIPTION DU DRAWINGS
The exemplary embodiments of the inventions will be described hereinafter in conjunction with these drawing figures. Like numerals denote similar elements and wherein:
FIG. “FIG.
FIG. “FIG. 1 in accordance to various embodiments.
FIG. “FIG.
FIG. “FIG.
FIG. “FIG.
FIG. “FIG.
FIGS. “FIGS.7-9” are functional block diagrams that show the use of neural networks for traffic signal light processing in accordance to various embodiments.
The following description is only an example and does not limit the use and application of the product. There is no intention to rely on any implied or explicit theory in the technical background, description, or the detailed description. The term “module” is used herein. The term “module” can be used to refer to hardware, software and firmware as well as electronic control components, processing logic and/or processor devices, individually and in combination.
Embodiments described in the present disclosure can be described in terms of functional or logical block components and different processing steps. These block components can be implemented by any combination of hardware, firmware, and software components that are capable of performing the required functions. An embodiment of the disclosure might employ various integrated circuit elements, such as memory elements, digital signal processing element, logic elements, look up tables or the like. These components may perform a variety functions under the control one or more microprocessors, or other control devices. Additionally, anyone skilled in the art will recognize that embodiments can be used in conjunction with many systems. The systems described herein are merely examples of the present disclosed.
Conventional techniques related to signal processing and data transmission, signaling control, machine learning, image analytics, signal processing, signaling, signaling, signaling, signaling, control, signaling, signaling, signaling, signaling, signaling, signaling, signaling, control, signaling, signaling, signaling, signaling, signaling or signaling may not be described herein. The connecting lines in the figures are meant to show examples of functional relationships between elements. An embodiment of the disclosure may include additional functional relationships and/or physical connections.
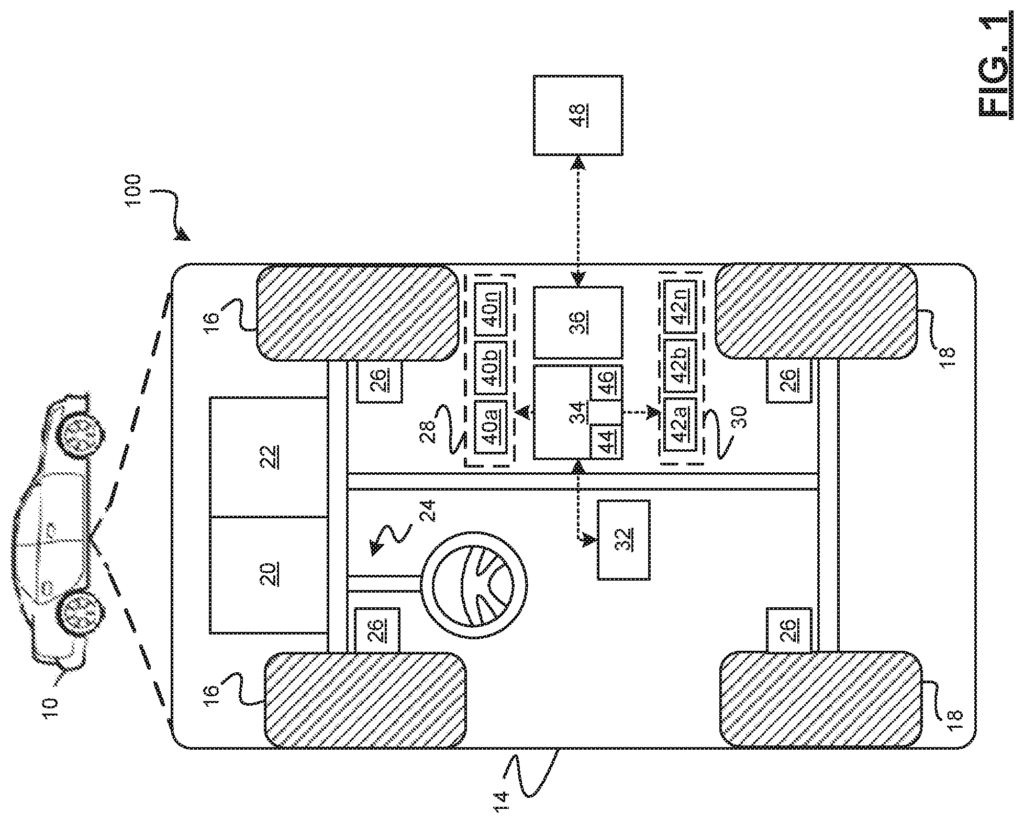
With reference to FIG. “With reference to FIG. 1, a system that performs an autonomous vehicle control is associated with a vehicle 10, in accordance with different embodiments. The system 100, in general, allows for low-level processing of three-dimensional images of the environment of the vehicle 10, in form of point clouds to determine the velocity of surrounding objects. This is used in controlling the vehicle 10.
FIG. The vehicle 10 generally includes a frame 12, a body 14 and front wheels 16 respectively. The chassis 12 is the body 14. It encloses the majority of the vehicle’s components. The chassis 12 and body 14 may be combined to form a frame. Each wheel 16-18 is rotated to the chassis 12 at a corner of the body 14.
In different embodiments, the vehicle 10, which is autonomous, and the system 100 and/or components thereof are integrated into the autonomous car 10 (hereinafter, the autonomous vehicle 10) (“autonomous vehicle 10”) An autonomous vehicle 10, for example, is a vehicle that can be controlled automatically to transport passengers from one place to the next. Although the vehicle 10 is shown in the illustrated embodiment, it can be used as a passenger vehicle. However, other vehicles, such as motorcycles, trucks and sport utility vehicles (SUVs), recreation vehicles (RVs), vessels, aircraft and the like, are also possible.
In an exemplary embodiment the autonomous vehicle 10 corresponds with a level four or five automation system according to the Society of Automotive Engineers?J3016? Standard taxonomy for automated driving levels. A level four system is considered high automation. A driving mode in which an automated driving system handles all aspects of dynamic driving tasks, even when a human driver is not available to assist. On the other hand, a level five system indicates “full automation”. A driving mode in which an automated driving system can perform all aspects of dynamic driving under any road and environmental conditions that are manageable by a human driver. The embodiments according to the present subject matter do not limit themselves to any specific taxonomy. Systems in accordance to the present embodiment can be used with any autonomous vehicle or vehicle that uses a navigation system and/or another systems to provide route guidance, implementation and/or execution.
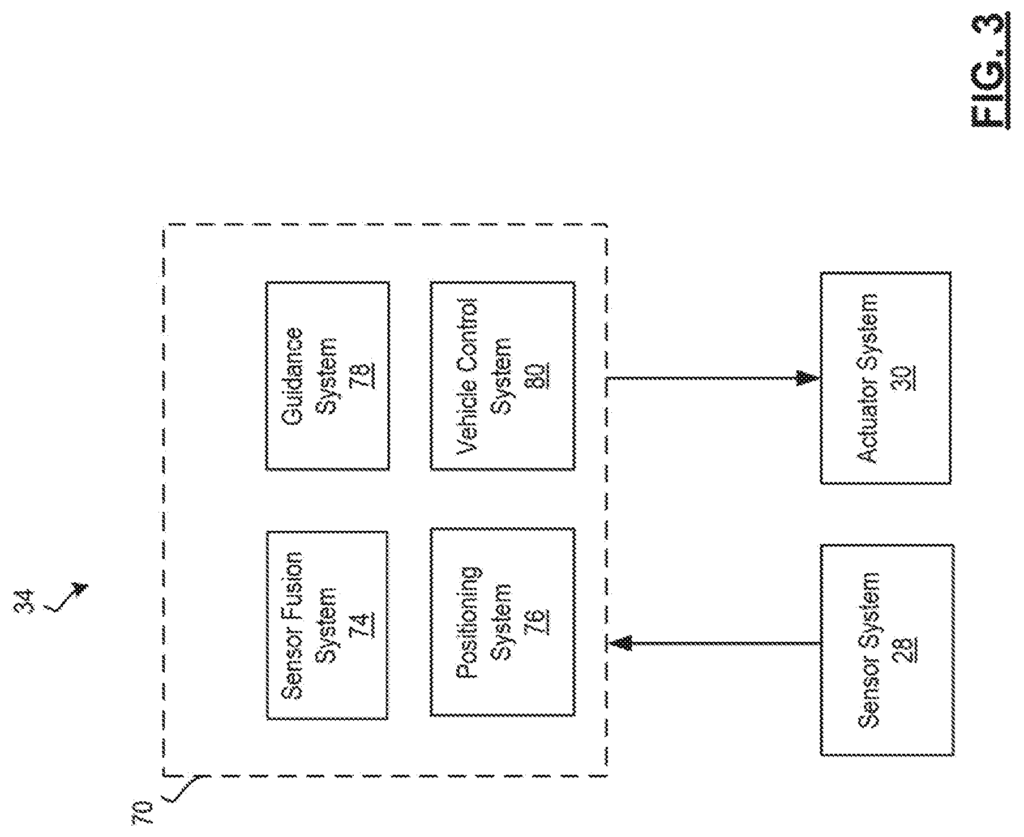
As shown in the figure, an autonomous vehicle 10 typically includes a propulsion and transmission system 20, a steering system 24, and a brake system 26, as well as an actuator system 30. It also contains at least one data storage device 32, at most one controller 34, and communication system 36. In various configurations, the propulsion system 20 can include an internal combustion engine, a motor such as a traction or a fuel cell propulsion. The transmission system 22 transmits power from the propulsion systems 20 to the wheels 16 and 18, according to selected speed ratios. According to various embodiments, the transmission system 22 may include a step-ratio automatic transmission, a continuously-variable transmission, or other appropriate transmission.
The brake system 26 provides braking torque to the wheels 16 and 18. In various embodiments, brake system 26 can include brake by wire, friction brakes, brake-by-wire, a regenerative brake system such an electric machine and/or other suitable braking systems.
The steering system 24 affects the position of the vehicle wheels 16 or 18. Although shown with a steering knob 25 as an illustration, some embodiments within the scope the present disclosure may not include it.
Click here to view the patent on Google Patents.
Leave a Reply