Invented by Brian Cullinane, Nicholas Kenneth Hobbs, Waymo LLC
In autonomous mode, vehicles rely on a combination of sensors, cameras, and artificial intelligence algorithms to navigate the roads. However, determining the optimal driving trajectory requires more than just avoiding obstacles and following traffic rules. Factors such as road conditions, traffic congestion, and passenger preferences must also be taken into account.
One of the key players in this market is the software and technology companies that develop the algorithms and systems for selecting the driving trajectory. These companies use machine learning and deep learning techniques to analyze vast amounts of data and make real-time decisions. Their algorithms consider various factors, including traffic patterns, weather conditions, and even the behavior of other drivers on the road.
Another important aspect of this market is the development of high-definition maps. These maps provide detailed information about the road network, including lane markings, traffic signs, and speed limits. By integrating these maps into the autonomous driving system, vehicles can accurately determine the best trajectory to follow, ensuring smooth and safe navigation.
Automotive manufacturers are also actively involved in this market. They are investing heavily in research and development to improve the autonomous driving capabilities of their vehicles. By collaborating with software companies and map providers, they aim to offer advanced features that allow users to select the driving trajectory based on their preferences.
The market for selecting the driving trajectory in autonomous mode is not limited to passenger vehicles. Delivery and logistics companies are also exploring this technology to optimize their operations. By choosing the most efficient routes, autonomous delivery vehicles can reduce delivery times and increase productivity.
Safety is a paramount concern in the development of autonomous vehicles. As such, regulatory bodies and government agencies play a crucial role in shaping this market. They establish guidelines and standards that ensure the safe operation of autonomous vehicles, including the selection of driving trajectories. Compliance with these regulations is essential for companies operating in this market.
The market for selecting the driving trajectory of a vehicle in autonomous mode is expected to grow significantly in the coming years. As technology continues to advance, vehicles will become more capable of making complex decisions and adapting to changing road conditions. This market offers immense opportunities for software companies, map providers, automotive manufacturers, and other stakeholders.
In conclusion, the market for selecting the driving trajectory of a vehicle in autonomous mode is a rapidly evolving sector. With advancements in technology and the increasing demand for autonomous vehicles, the ability to choose the driving trajectory is becoming a crucial factor in ensuring safe and efficient transportation. This market offers immense opportunities for companies involved in software development, map creation, and automotive manufacturing, while also prioritizing safety and regulatory compliance.
![]()
The Waymo LLC invention works as follows
Methods are disclosed to customize driving operations for a vehicle depending on the occupants of the vehicle. A passenger compartment of an autonomous vehicle can be used to determine the presence of occupants. The autonomous vehicle is able to determine the location of the occupant in the passenger compartment. It is possible to determine additional information about the passenger. Based on the location of the occupant and the additional information, a driving operation can then be selected. The driving operation selected can be carried out, perhaps by an autonomous vehicle.
Background for Selecting the driving trajectory of a vehicle in autonomous mode
The materials described here are not considered prior art for the claims of this application, and their inclusion in this section does not admit them to be prior arts.
Some vehicles can be configured to operate autonomously, which means that they navigate through the environment without much or any input from a human driver. A vehicle of this type typically has one or more sensors designed to detect information about the surrounding environment. The vehicle can navigate using the information it has sensed. “For example, if sensors detect that the vehicle is nearing an obstacle, it can navigate around this obstacle.
The vehicle has a compartment that is usually for the passengers. The passenger compartment can hold up to two passengers. Most passengers are a driver, who can control the vehicle’s speed, direction and acceleration manually. The driver usually rides in the front seat, and passengers in the rest of the compartment.
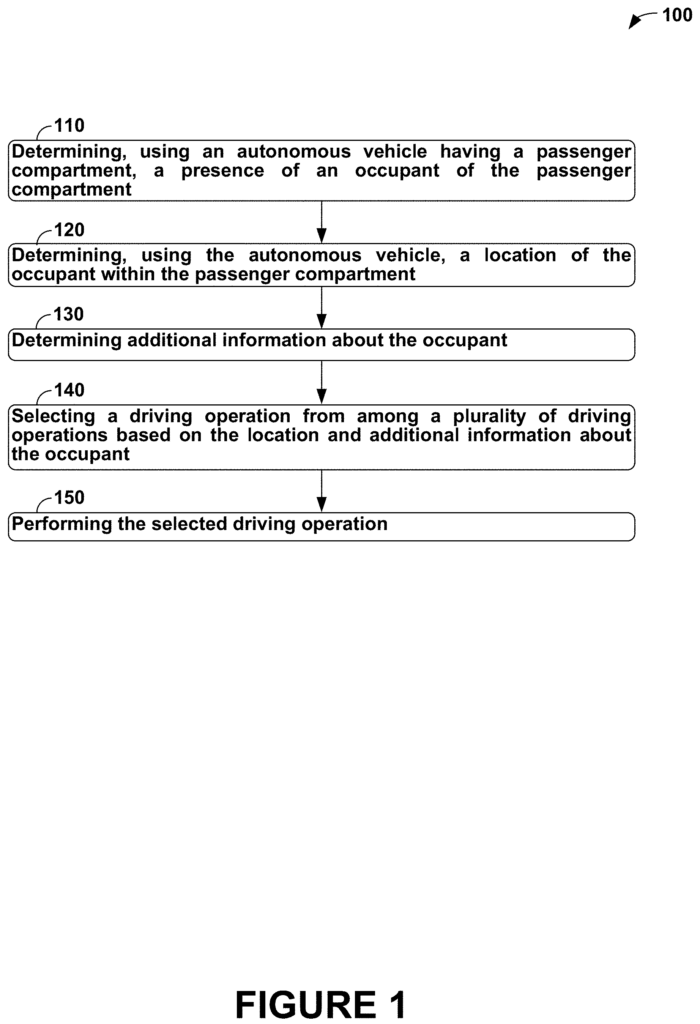
In a first aspect, the method is described. A passenger compartment of an autonomous vehicle determines the presence of occupants in that compartment. The autonomous vehicle can be used to determine the location of the occupant in the passenger compartment. The autonomous vehicle determines additional information about the passenger. Based on the occupant’s location and other information, a driving operation is chosen from a number of driving operations. The selected driving action is carried out.
In another aspect is provided an article of manufacture that includes a nontransitory computer readable storage medium with program instructions thereon. Upon execution, the program instructions cause a computer to perform certain operations. “The operations include (a) determining the presence of an occupant in a passenger compartment (b) determining the location of the passenger within the compartment (c) determining more information about that occupant (d) choosing a driving action from a plurality based on location and the additional information regarding the occupant (e) performing this selected driving action.
An autonomous vehicle is also provided in another aspect.” The autonomous vehicle comprises a passenger compartment and a processor. It also includes a computer-readable medium. The non-transitory, computer-readable storage medium contains instructions that, upon execution by the processor cause the autonomous vehicle perform operations. “The operations include (a) determining the presence of an occupant in the passenger compartment (b) determining the location of the person within the compartment (c) determining more information about that person, (d), selecting a driving action from a plurality based on location and the additional information, and (e), performing the driving action selected.
The summary above is intended only as an example and not to be limiting in any way. The figures and detailed description will reveal additional aspects, embodiments and features in addition to those described above.
Overview
The examples disclosed herein are methods and apparatus which consider information about the vehicle occupants when selecting and performing certain driving behaviors. The information about the vehicle occupants can include, but not be limited to, the position of the occupants within the vehicle, the sizes/weights of those occupants, their identities, and their preferences. Sensors, direct input by occupants, data gathered outside the vehicle and other sources can all be used to determine information about vehicle occupants.
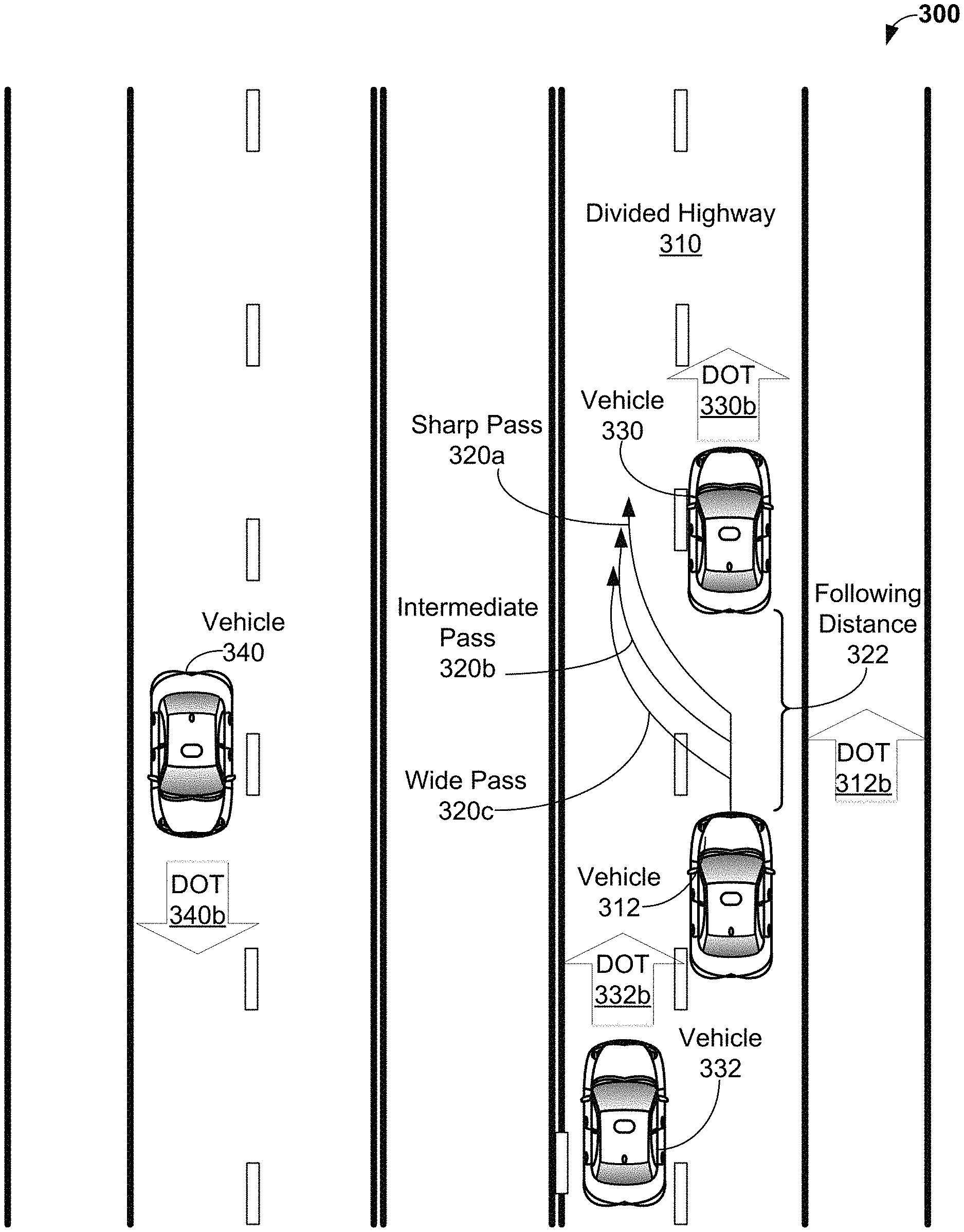
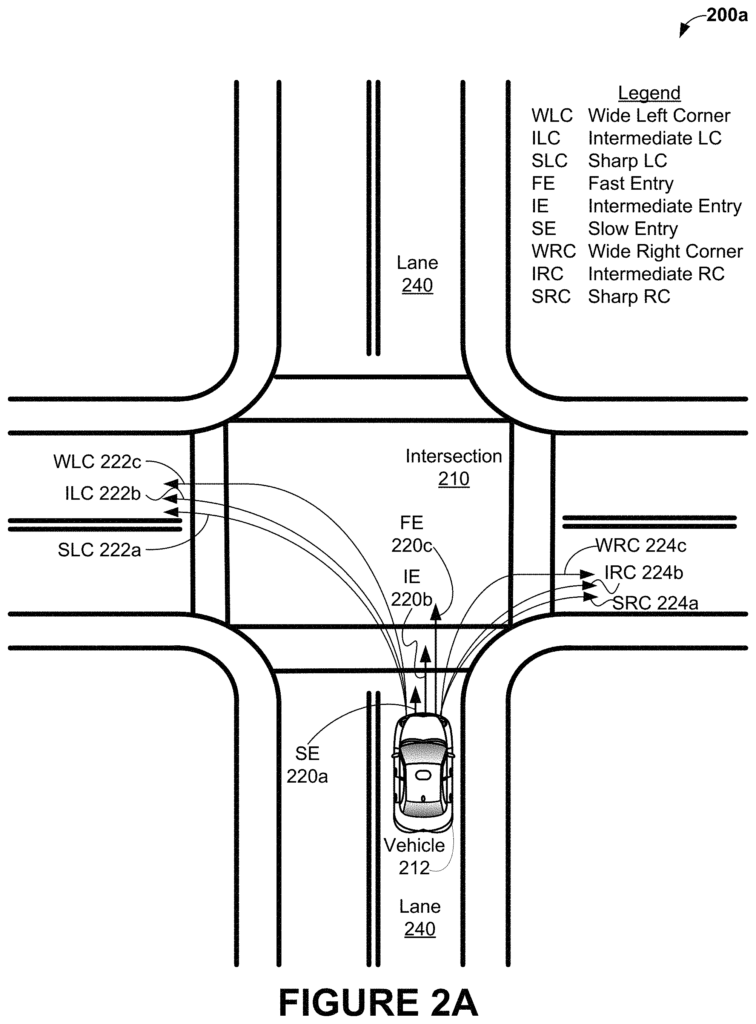
The autonomous vehicle can select and perform driving behaviors. The autonomous vehicle may include a computer program that functions as a vehicle controller and generates, selects or performs driving behavior. In some embodiments the driving behavior can be determined by the occupants of the vehicle. Examples of driving behaviors include: maintaining a road driving speed average, changing speed, selecting and traversing a route, turning/traversing at an intersection, or passing behaviors such as maintaining an average passing distance. Other driving behaviors can also be performed.
The vehicle control system may be an integral part of, or in the form of, a vehicle such as a car. The vehicle control system can also be installed in another vehicle such as a tractor, motorcycle, offroad vehicle or bus. It could even take the form or a lawnmower, amusement park vehicle or farm vehicle. Vehicle control systems can also be used to control other vehicles.
The autonomous vehicle may operate in a number of operational modes, including a nonautonomous, partially-autonomous, or autonomous operation mode. In the non-autonomous operation mode, human input can be used to select and execute driving behavior during vehicle operation. In the partially-autonomous setting, both human inputs and vehicle control systems are used to select driving behavior during vehicle operation. The vehicle control system, for example, can generate driving behavior indications that a driver can review. The human driver can examine each indication and then operate the vehicle either by following, altering, or ignoring it. In some cases, a partially-autonomous vehicle can perform all the actions necessary to navigate and drive a vehicle. A human driver can monitor and intervene as needed, e.g. to avoid an accident. Other techniques, like auto-piloting or automatic parking, can be used to operate a vehicle partially autonomously.
In the autonomous-operations mode, the vehicle’s control system is able to select and execute driving behavior along at least a part of the route with no human input. The autonomous-operation can be divided into three sub-modes: one with a trained human driver and another without. The vehicle control system may be configured in autonomous mode operation with a driver to receive feedback about the driving quality from the driver. In some cases, the driver can operate the vehicle.
To determine the position of an occupant in a vehicle, a sensor or sensors may be used. Seat weight sensors or occupant classification systems, for example, can detect the presence occupants. In certain embodiments, pressure and heat sensors are used in combination to detect weight and heat emission characteristic of an occupant. Based on data from seat weight sensors or occupant classification systems it is possible to determine the age and position of an occupant. An occupant who weighs 40 pounds, for example, can be classified a lighter individual. However, an individual weighing 200 pounds could be classified a heavier individual. These data can report the location of the occupants in the vehicle.
In some scenarios, sensors that are added can provide information on age classifications. An anchor hook that is used to attach a safety chair can be equipped with a sensor. This sensor will detect whether the safety seat has been attached. The autonomous vehicle can check the anchor-hook sensor when a potential occupant in the vehicle’s seat, who may be either a young or old person, is detected. The age classification of a vehicle can be changed if the anchor-hook sensors indicates that a safety chair is attached. If the anchor-hook indicates that a safety chair is not attached, the age classification may be changed to reflect an older driver.
An occupant’s identity can be determined.” In certain embodiments, a vehicle control system may have a voice-interface that can record, compare and store voice information. The stored voice information can be used to identify occupants. In other embodiments, the occupants may provide identifying data textually, for example, by using a touch-screen, touchpad, keypad or another interface that allows an occupant enter text. Text entered by an occupant can contain identifying information which can be stored and compared with captured data to determine the identity of that occupant. In other embodiments, images of the occupants can be captured by a camera, similar device, and stored. These images can then be compared, for example, using facial recognition techniques, to identify them. In yet other embodiments information from multiple devices may be analyzed to identify occupants of the vehicle. For example, the location and/or speed information of a device such as a cell phone associated with a person can be compared with the location and/or speed information for the autonomous car. If the device’s (approximate) location and/or speed information matches the location and/or the velocity information of the autonomous car, the passenger who is associated with that device can be located in the vehicle. These techniques can be combined with other techniques for identifying occupants (e.g. biometric techniques) or used instead.
A profile can contain information about one or several occupants. Initializing the occupant profile from a default profile containing information about an occupant generic of the vehicle is possible. A sample profile is shown below in Table 1.
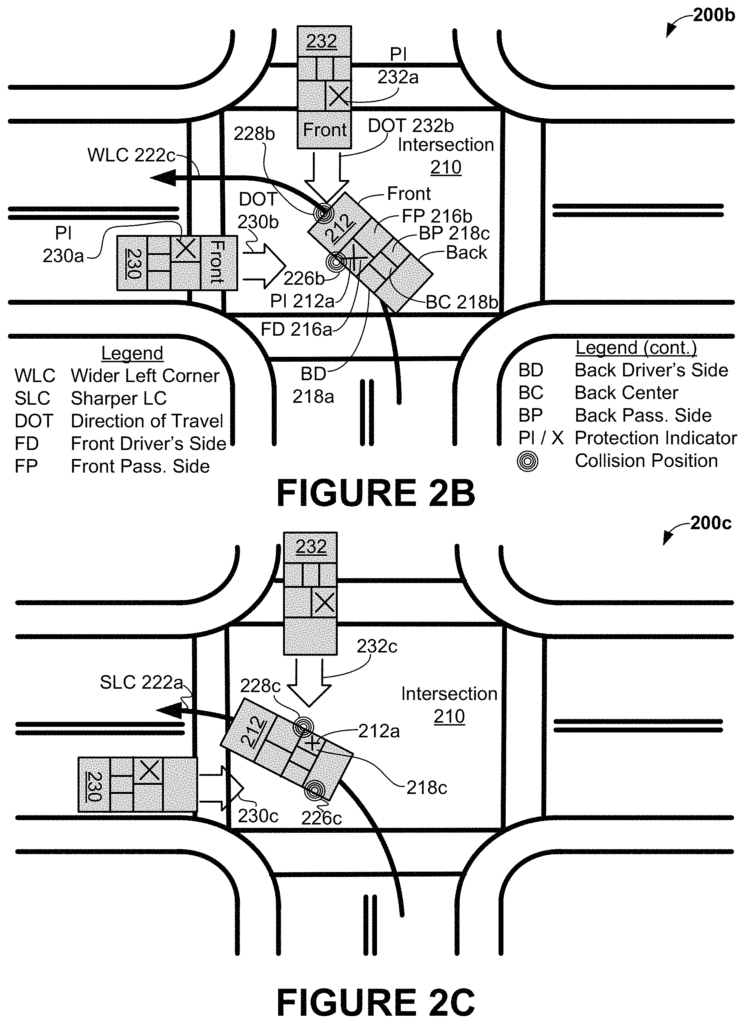
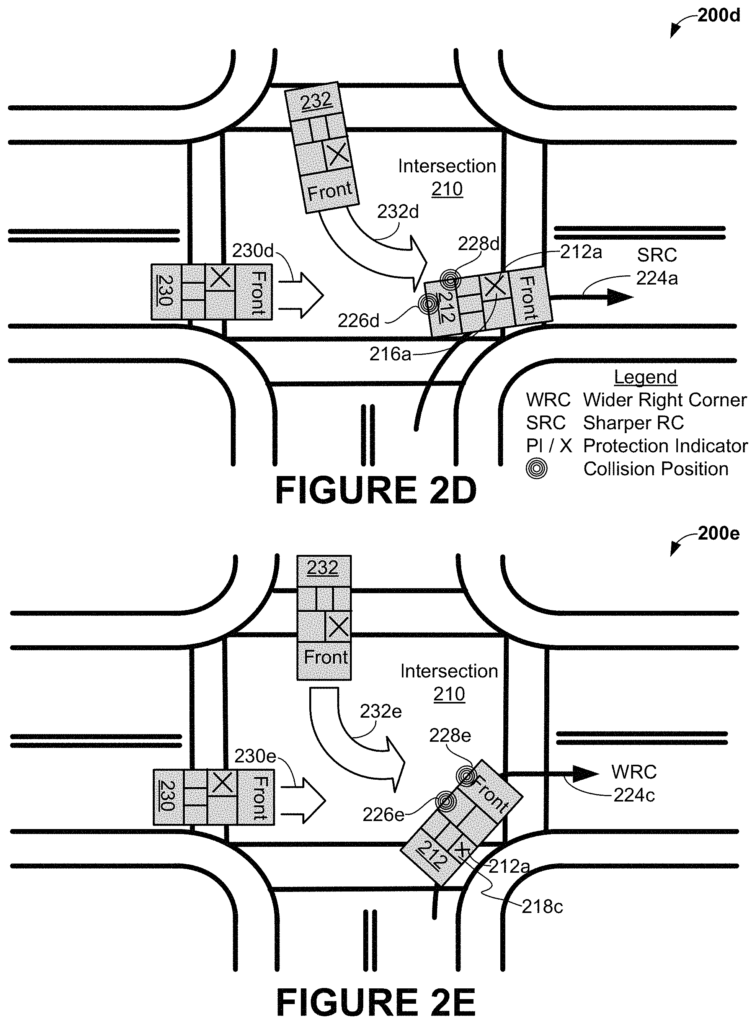
TABLE 1\nDriving Behavior Occupant Configuration Behavior Setting\nTurn left through Driver’s seat only Protect driver\nintersection\nTurn left through Driver’s seat + Protect front end\nintersection front passenger seat\nTurn left through Driver seat + rear Protect driver’s side\nintersection driver’s side seat\nStraight ahead All Creep through crosswalk\nthrough intersection and gradually increase\nspeed after\nFollowing behavior All Use two-second rule\nPassing behavior Driver’s seat only Safe passing\nPassing behavior Driver seat + rear Safe passing\ndriver’s side passenger\nseat\nMaximum Speed All 80
In some embodiments the profile shown in Table 1 may be used as a default.
Once an occupant’s profile has been generated, they can do various things with it, e.g. review the profile and change the behavior settings. They can save the profile or restore default settings. They can delete the profile. In other embodiments more, less and/or different data than that shown in Table 1 may be included in a default profile and/or an occupant profile. A profile, for example, can include additional information than that in Table 1. This includes, but is not limited to: occupant identification, additional driving behavior, behavior settings and/or occupant profiles, routing information and location information.
Using information about the occupants of vehicles can lead autonomous and non-autonomous cars to behave in a more tailored way.” Customized behavior may include safer and more efficient driving styles that provide greater satisfaction to the passengers. The behaviors can be customized, for example, by using occupant-specific profiles. This allows an occupant to make choices that will cause the vehicle’s behavior to align more closely with their desired driving behaviors. “In some cases, the adoption and use autonomous vehicles can be increased by increasing their flexibility by giving the occupants more choices and control.
Click here to view the patent on Google Patents.
Leave a Reply