Invented by Adam Henry Polk Milstein, Donald Jason Burnette, Lisa Christine Weitekamp, Bryan John Nagy, Eric Michael Perko, Uatc LLC
Mapping driving paths for autonomous vehicles involves creating detailed and accurate maps that provide crucial information to self-driving cars. These maps go beyond traditional navigation maps by including specific data points such as lane markings, traffic signs, and even road conditions. This level of detail is essential for autonomous vehicles to navigate safely and make informed decisions on the road.
One of the key players in this market is mapping companies like HERE Technologies and TomTom. These companies have been at the forefront of developing mapping solutions for autonomous vehicles, leveraging their expertise in cartography and data analytics. They collect data from various sources, including satellite imagery, LiDAR (Light Detection and Ranging) sensors, and vehicle-mounted cameras, to create highly accurate maps.
Another important aspect of mapping driving paths for autonomous vehicles is the continuous updating and maintenance of these maps. As road conditions change, new construction projects emerge, or traffic patterns evolve, it is crucial to keep the maps up to date. This requires a combination of real-time data collection, machine learning algorithms, and human verification to ensure the accuracy and reliability of the maps.
The market for mapping driving paths for autonomous vehicles is not limited to traditional mapping companies. Technology giants like Google and Apple have also entered the race, leveraging their vast resources and expertise in data analytics. Google’s Waymo, for example, has developed its own mapping technology specifically tailored for self-driving cars. These companies bring a unique perspective to the market, combining their mapping capabilities with other technologies such as artificial intelligence and machine learning.
The demand for mapping driving paths for autonomous vehicles is driven by the increasing adoption of self-driving cars by both consumers and businesses. Autonomous vehicles have the potential to revolutionize transportation, offering benefits such as improved safety, reduced congestion, and increased efficiency. However, to realize these benefits, self-driving cars need accurate and reliable mapping data to navigate complex road networks.
The market for mapping driving paths for autonomous vehicles is expected to grow significantly in the coming years. According to a report by Allied Market Research, the global autonomous vehicle mapping market is projected to reach $15.9 billion by 2027, with a compound annual growth rate of 21.1% from 2020 to 2027. This growth is fueled by advancements in mapping technologies, increased investment in autonomous vehicle research and development, and supportive government regulations.
In conclusion, the market for mapping driving paths for autonomous vehicles is a rapidly expanding industry driven by the demand for self-driving cars. Mapping companies, as well as technology giants, are investing heavily in developing accurate and reliable mapping solutions to support the development of autonomous vehicles. With the potential to revolutionize transportation, the market for mapping driving paths for autonomous vehicles is expected to continue growing in the coming years.
The Uatc LLC invention works as follows
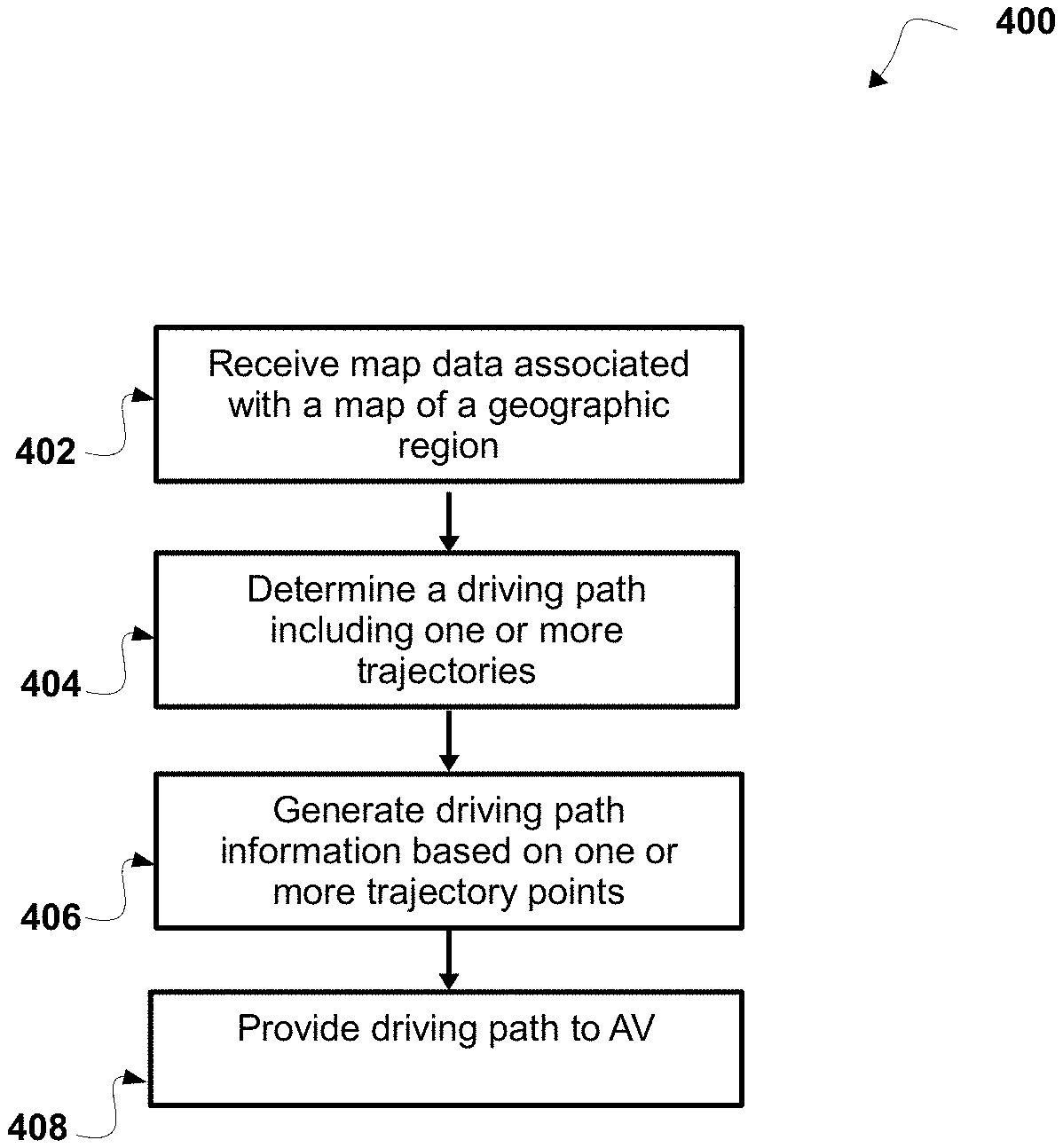
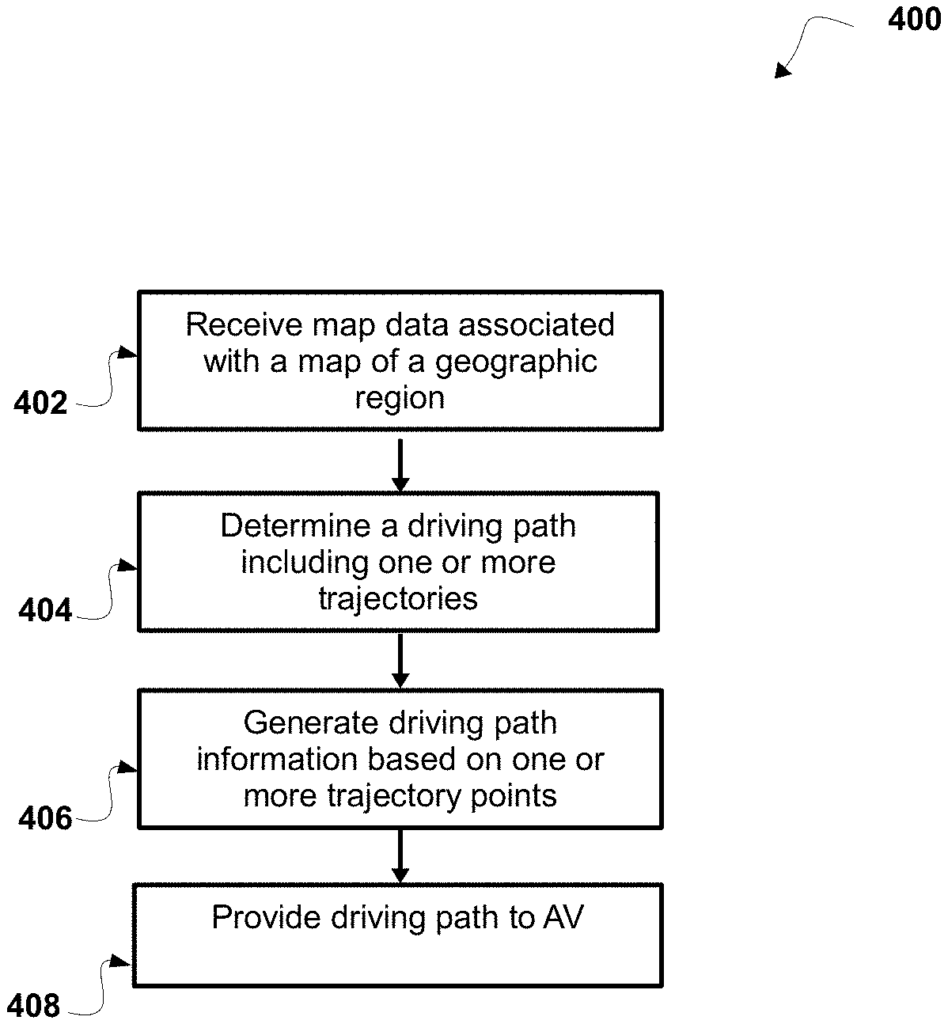
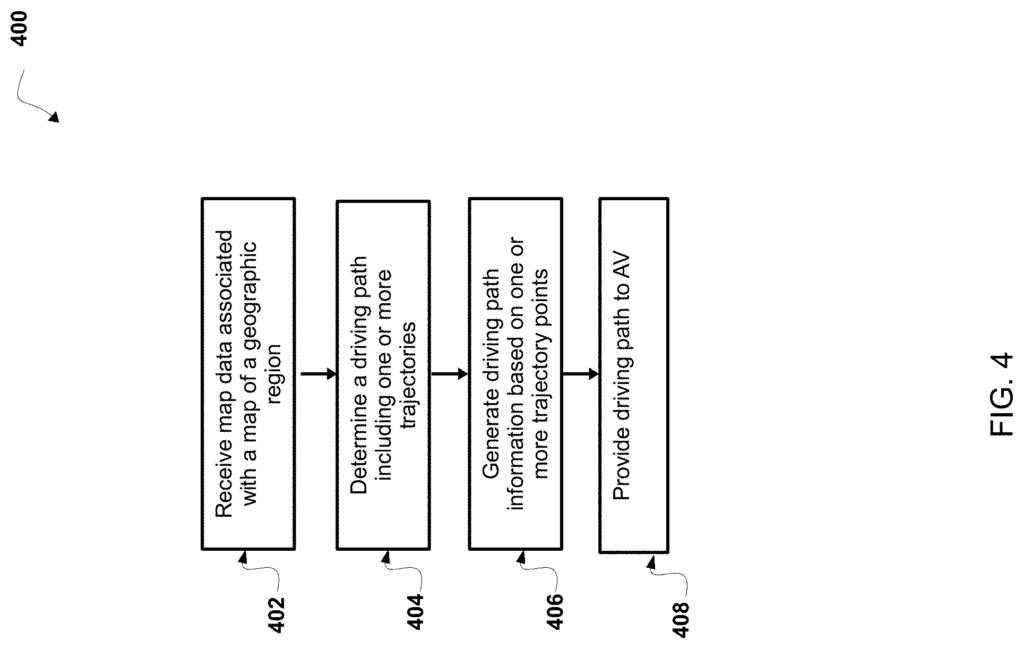
A method of receiving autonomous vehicle (AV), driving path data, associated with a path on a road in a geographical location. The map data is used to determine at least one feature on the road that is positioned at a distance from the first trajectory. “The method includes receiving data from a map indicating a geographical location, determining the driving paths for an AV, generating information about driving paths based on a point on the trajectory of the driving route, and providing the driving data to the AV so that it can control the AV.
Background for Mapping driving paths for autonomous vehicles
An autonomous car (AV)” (e.g. a driverless vehicle, a autonomous car, self-driving cars, robotic cars, etc.). A vehicle capable of sensing its environment and moving (e.g., navigation, movement, etc.). The vehicle can navigate and move in its environment without any human intervention. The AV can detect its environment using a number of methods, including radar, laser light and GPS. Other techniques include odometry or computer vision. “In some cases, an AV will use a control system that interprets information from one or several sensors to determine a path for travel, identify obstacles in the route, and identify relevant traffic signs.
The method includes: receiving map data from a computer system with one or multiple processors associated with a map showing a geographical location and a road in that location. With the computer system, determining a driving route including one of more trajectories in a highway based on one of more vehicle traversals in the roadway. Generating, with this computing system driving information based upon one or several trajectory points on the one of more trajectories in the roadway.
The method of generating driving path information may include, in some non-limiting embodiments: determining, on the basis of map data, at least a lateral position of at least a feature of a roadway from a first trajectory; and, in response to the determination of at least a feature of a roadway, determining, on the basis of at least the distance of at least a feature of a roadway from the first path, a lateral restriction associated with at lease one lateral movement by an AV
The following non-limiting aspects or embodiments are included: “Determining at least one road feature orthogonal to a driving path includes: determining the interval for the drive path, which is associated with selecting the first group of trajectory point in the first trajectory. Using the map data, determining the lateral area in the roadway between the first edges of the set of first set trajectory points. Each edge of the set of first edges has an orthogonal project from a particular point in the set of first set trajectory points of the
In certain non-limiting embodiments, or aspects, determining the driving route further includes: identifying the primary road in the driving way, the primary road including a first trajectory among the one or multiple trajectories on the driving way, wherein this primary path meets a threshold that indicates a driving mode for the AV.
The method may include, in some non-limiting aspects or embodiments, identifying a secondary route in the driving course, which includes a second trajectory from the one or multiple trajectories on the driving course, where the secondary route does not meet a threshold that indicates a driving mode for controlling the AV autonomously; and linking the primary road to the secondary road, where the first trajectory is linked to a second path in secondary.
In some non-limiting aspects or embodiments, the curvature and heading associated with the entry of the secondary pathway match the curvature and heading associated with the end of the primary route.
In some non-limiting aspects or embodiments, determining the driving route further includes: determining the end of a primary road that isn’t linked to the driving way; determining the entry of a secondary primary road of the roadway that is associated with the end of the primary road that isn’t linked to the driving way; determining the heading of the primary driveway at the end of the primary pathway that matches the heading of the primary path at the entry of the path; and connecting the end of the primary path at the
In some non-limiting aspects or embodiments, the entry point for the driving route is associated with information about the entry of the primary path. The entry information includes at least one of the following: heading information, curve information, and acceleration data of the driving pathway.
In some non-limiting aspects or embodiments, the one or multiple trajectories are associated with either a spline or a polyline or any combination of these.
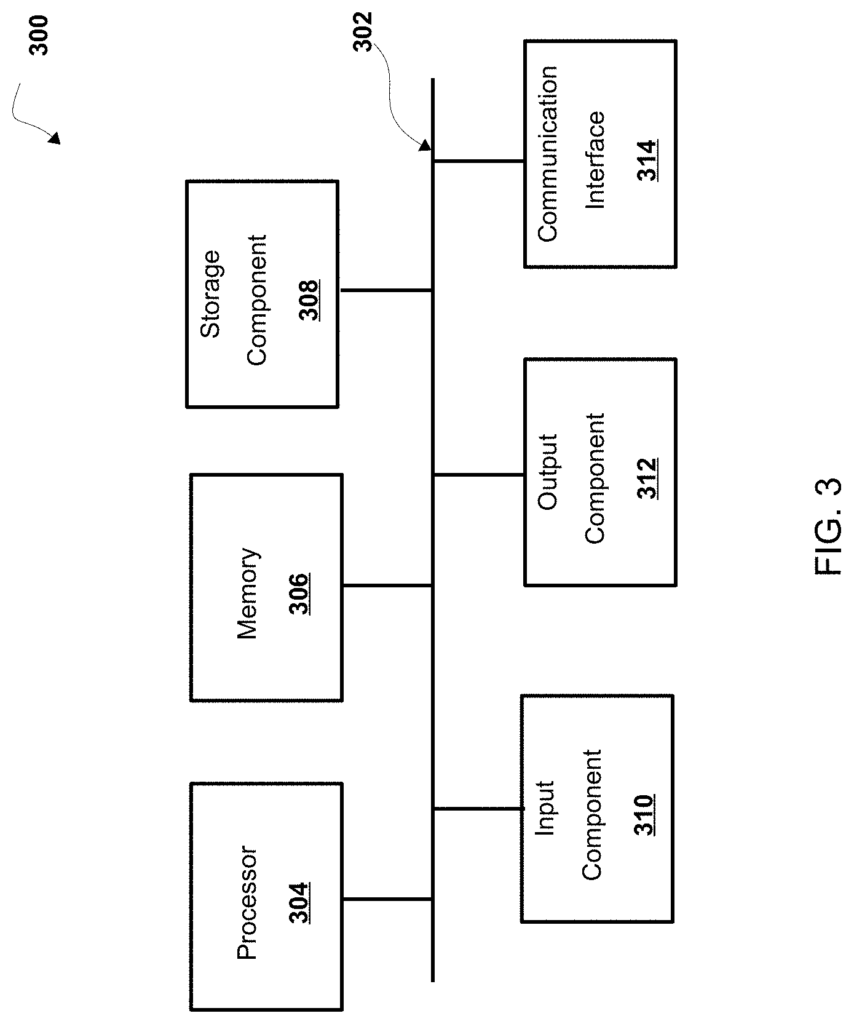
According to certain non-limiting embodiments and aspects, a computer system includes: one of more processors configured to receive map data that is associated with an image of a geographical location, wherein map data is associated a road in the geographic location. Determine a driving route including one of more trajectories in a highway based upon one or multiple traversals of the road by one vehicle; generate driving information based upon one or several trajectory points of the one of more trajectories in the roadway.
The one or multiple processors are configured, in some non-limiting aspects or embodiments, to determine, based at least on the lateral position of the atleast one feature on the road, a lateral restriction based at the least on the lateral separation of the atleast one feature from the first trajectory. This lateral restriction is associated with atleast one lateral movement by an AV on the driving track on the road.
The map data is used to determine the lateral area in the road based on a location between the edges of a set of first set trajectory points. Each edge in the set includes an orthogonal project from a point in the set.
In some non-limiting aspects or embodiments, the one processors are further configured, when determining a driving route, to: identify a main path in the path of travel, the primary road including a first trajectory among the one or multiple trajectories, where the primary way satisfies the threshold for a driving mode that controls the AV.
The one or two processors are further configured in some non-limiting aspects or embodiments to: identify a primary path in the driving route, the primary course including a first trajectory, and the secondary road includes a second trajectory, where the secondary way does not meet a threshold that indicates a driving mode for controlling the AV autonomously; link the primary to secondary paths, where the first trajectory on the primary is linked to the 2nd trajectory in secondary path.
In some non-limiting aspects or embodiments, the curvature and heading associated with the entry of the secondary pathway match the curvature and heading associated with the end of the primary route.
The following non-limiting aspects or embodiments may be used to determine the driving paths: “determine an end of a primary road that isn’t linked to a path driving; determine the entry of a secondary primary roadway that is associated with the first path end that isn’t linked to a path driving; determine the heading of the primary road at the end of the primary in the driving route that matches the heading of the primary at the entry of the path driving; and link the primary to the secondary.
In some non-limiting aspects or embodiments, the entry point for the driving route is associated with information about the entry of the primary path. The entry information includes at least one of the following: heading information, curve information, and acceleration data of the driving pathway.
In some non-limiting aspects or embodiments, one or more driving paths are associated with either a spline or a polyline or any combination of these.
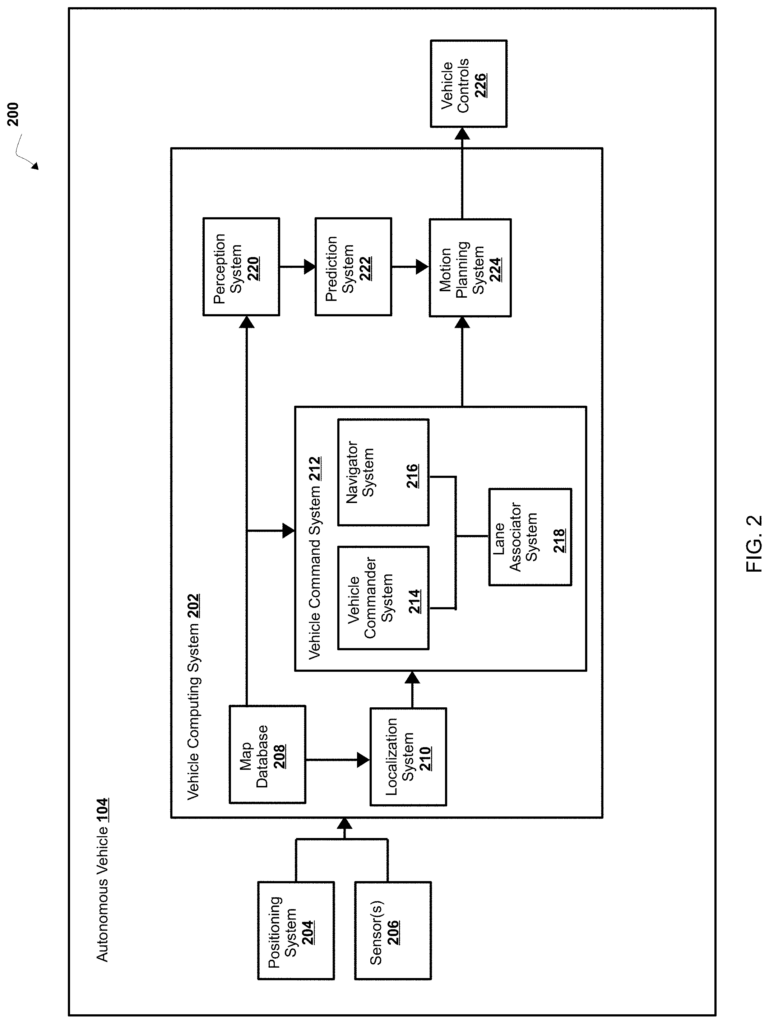
The vehicle computing system can be configured to receive driving paths data, which includes one or multiple trajectories an AV could traverse on the road, and indicate the location of one or more features in the road a distance lateral from the driving route. It will also determine a route that includes the driving pathway of the highway in the geographical location using the driving data.
The vehicle computing system can be configured to control the travel of the AV along at least one primary path on the driving route based on the sensor data provided by the one or two sensors, and the driving data associated with that driving path.
Click here to view the patent on Google Patents.
Leave a Reply